Суочавамо се са проблемима оптимизације у многим стварним околностима у којима морамо да идентификујемо минимум или максимум функције.
Сматрајте да је функција математички приказ система, а одређивање њеног минимума или максимума може бити критично за различите апликације као што су машинско учење, инжењеринг, финансије и друге.
Размислите о пејзажу са брдима и долинама, а наш циљ је да пронађемо најнижу тачку (минимум) како бисмо што брже стигли до нашег одредишта.
Често користимо алгоритме градијентног спуштања да бисмо решили такве изазове оптимизације. Ови алгоритми су итеративне методе оптимизације за минимизирање функције предузимањем корака у правцу најстрмијег спуштања (негативни градијент).
Градијент одражава правац са најстрмијим порастом функције, а путовање у супротном смеру води нас до минимума.
Шта је тачно алгоритам градијентног спуштања?
Градијентно спуштање је популаран итеративни приступ оптимизације за одређивање минимума (или максимума) функције.
То је критично средство у неколико области, укључујући Машина учење, дубоко учење, вештачка интелигенција, инжењеринг и финансије.
Основни принцип алгоритма заснива се на коришћењу градијента, који приказује правац најоштријег повећања вредности функције.
Алгоритам ефикасно навигира пејзажом функције ка минимуму понављајући кораке у супротном смеру од градијента, итеративно рафинишући решење до конвергенције.
Зашто користимо алгоритме градијентног спуштања?
За почетак, могу се користити за решавање широког спектра проблема оптимизације, укључујући и оне са високодимензионалним просторима и сложеним функцијама.
Друго, они могу брзо да пронађу оптимална решења, посебно када је аналитичко решење недоступно или рачунарски скупо.
Технике градијентног спуштања су веома скалабилне и могу успешно да обрађују огромне скупове података.
Као резултат тога, они се широко користе у алгоритми машинског учења попут обучавања неуронских мрежа да уче из података и модификују своје параметре како би се грешке у предвиђању свеле на минимум.
Детаљан пример степеница градијентног спуштања
Хајде да погледамо детаљнији пример да бисмо боље разумели технику градијента спуштања.
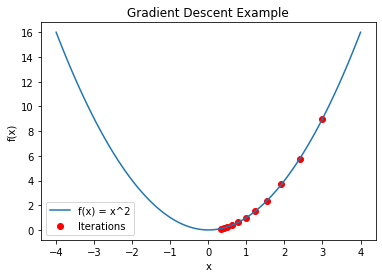
Размотримо 2Д функцију ф(к) = к2, која генерише основну параболичну криву са минимумом на (0,0). Алгоритам градијентног спуштања ће се користити за одређивање ове минималне тачке.
Корак 1: Иницијализација
Алгоритам градијентног спуштања почиње иницијализацијом вредности променљиве к, представљене као к0.
Почетна вредност може имати значајан утицај на перформансе алгоритма.
Насумична иницијализација или коришћење претходног знања о проблему су две уобичајене технике. Претпоставимо да је к₀ = 3 на почетку нашег случаја.
Корак 2: Израчунајте градијент
Градијент функције ф(к) на садашњој позицији к₀. онда се мора израчунати.
Градијент показује нагиб или брзину промене функције на тој одређеној позицији.
Израчунавамо извод за к за функцију ф(к) = к2, што даје ф'(к) = 2к. Добијамо градијент на к0 као 2 * 3 = 6 заменом к₀ = 3 у прорачуну градијента.
Корак 3: Ажурирајте параметре
Користећи информације о градијенту, ажурирамо вредност к на следећи начин: к = к₀ – α * ф'(к₀), где α (алфа) означава брзину учења.
Брзина учења је хиперпараметар који одређује величину сваког корака у процесу ажурирања. Постављање одговарајуће стопе учења је кључно јер спора стопа учења може узроковати алгоритам да урадите превише понављања да бисте достигли минимум.
Висока стопа учења, с друге стране, може довести до тога да алгоритам одскаче или не успе да конвергира. Претпоставимо да је стопа учења α = 0.1 ради овог примера.
Корак 4: Поновите
Након што имамо ажурирану вредност к, понављамо кораке 2 и 3 за унапред одређени број итерација или док промена к не постане минимална, што указује на конвергенцију.
Метод израчунава градијент, ажурира вредност к и наставља процедуру на свакој итерацији, омогућавајући јој да се приближи минимуму.
Корак 5: Конвергенција
Техника конвергира након неколико итерација до тачке у којој даља ажурирања не утичу материјално на вредност функције.
У нашем случају, како се итерације настављају, к ће се приближити 0, што је минимална вредност ф(к) = к^2. Број итерација неопходних за конвергенцију одређен је факторима као што су изабрана брзина учења и сложеност функције која се оптимизује.
Одабир стопе учења ()
Одабир прихватљиве стопе учења () је критичан за ефикасност алгоритма градијента спуштања. Као што је раније речено, ниска стопа учења може изазвати спору конвергенцију, док висока стопа учења може узроковати прекорачење и неуспјех у конвергенцији.
Проналажење одговарајуће равнотеже је кључно да би се осигурало да се алгоритам што ефикасније приближава жељеном минимуму.
Подешавање брзине учења је често у пракси поступак покушаја и грешке. Истраживачи и практичари рутински експериментишу са различитим стопама учења како би видели како оне утичу на конвергенцију алгоритма у њиховом конкретном изазову.
Руковање неконвексним функцијама
Док је претходни пример имао једноставну конвексну функцију, многи проблеми оптимизације у стварном свету укључују неконвексне функције са много локалних минимума.
Када се у таквим случајевима користи градијентни спуштање, метода може конвергирати на локални минимум, а не на глобални минимум.
Развијено је неколико напредних облика градијентног спуштања да би се превазишао овај проблем. Стохастичко спуштање градијента (СГД) је једна таква метода која уводи случајност бирањем случајног подскупа тачака података (познатих као мини-батцх) за израчунавање градијента при свакој итерацији.
Ово насумично узорковање омогућава алгоритму да избегне локалне минимуме и истражи нове делове терена функције, повећавајући шансе за откривање бољег минимума.
Адам (Адаптиве Момент Естиматион) је још једна истакнута варијација, која је адаптивни приступ оптимизацији брзине учења који укључује предности и РМСпроп-а и импулса.
Адам динамички модификује брзину учења за сваки параметар на основу претходних информација о градијенту, што може резултирати бољом конвергенцијом на неконвексним функцијама.
Ове софистициране варијације градијента спуштања показале су се ефикасним у руковању све сложенијим функцијама и постале су стандардни алати у машинском учењу и дубоком учењу, где су проблеми неконвексне оптимизације уобичајени.
Корак 6: Визуелизирајте свој напредак
Хајде да видимо напредак алгоритма градијентног спуштања да бисмо боље разумели његов итеративни процес. Размотримо график са к-осом која представља итерације и и-осом која представља вредност функције ф(к).
Како се алгоритам понавља, вредност к се приближава нули и, као резултат, вредност функције опада са сваким кораком. Када се прикаже на графикону, ово би испољило јасан тренд смањења, одражавајући напредак алгоритма ка достизању минимума.
Корак 7: Фино подешавање брзине учења
Брзина учења () је важан фактор у перформансама алгоритма. У пракси, одређивање идеалне стопе учења често захтева покушаје и грешке.
Неке технике оптимизације, као што су распореди брзине учења, могу динамички да мењају брзину учења током тренинга, почевши од веће вредности и постепено је смањујући како се алгоритам приближава конвергенцији.
Овај метод помаже да се успостави равнотежа између брзог развоја на почетку и стабилности на крају процеса оптимизације.
Други пример: минимизирање квадратне функције
Хајде да погледамо још један пример да бисмо боље разумели спуштање градијента.
Размотримо дводимензионалну квадратну функцију г(к) = (к – 5)^2. Код к = 5, ова функција такође има минимум. Да бисмо пронашли овај минимум, применићемо градијентни пад.
1. Иницијализација: Почнимо са к0 = 8 као почетном тачком.
2. Израчунати градијент г(к): г'(к) = 2(к – 5). Када заменимо к0 = 8, градијент на к0 је 2 * (8 – 5) = 6.
3. Са = 0.2 као нашом стопом учења, ажурирамо к на следећи начин: к = к₀ – α * г'(к₀) = 8 – 0.2 * 6 = 6.8.
4. Понављање: Понављамо кораке 2 и 3 онолико пута колико је потребно док се не постигне конвергенција. Сваки циклус доводи к ближе 5, минималној вредности г(к) = (к – 5)2.
5. Конвергенција: Метод ће на крају конвергирати до к = 5, што је минимална вредност г(к) = (к – 5)2.
Поређење стопа учења
Хајде да упоредимо брзину конвергенције градијентног спуштања за различите стопе учења, рецимо α = 0.1, α = 0.2 и α = 0.5 у нашем новом примеру. Можемо видети да ће нижа стопа учења (нпр. = 0.1) резултирати дужом конвергенцијом, али прецизнијим минимумом.
Већа стопа учења (нпр. = 0.5) ће се брже приближавати, али може прећи или осцилирати око минимума, што резултира лошијом прецизношћу.
Мултимодални пример руковања неконвексним функцијама
Узмимо х(к) = син(к) + 0.5к, неконвексну функцију.
Постоји неколико локалних минимума и максимума за ову функцију. У зависности од почетне позиције и брзине учења, могли бисмо конвергирати на било који од локалних минимума коришћењем стандардног градијента спуштања.
Ово можемо да решимо коришћењем напреднијих техника оптимизације попут Адама или стохастичког градијента спуштања (СГД). Ове методе користе прилагодљиве стопе учења или насумично узорковање да би истражиле различите регионе пејзажа функције, повећавајући вероватноћу постизања бољег минимума.
Zakljucak
Алгоритми градијентног спуштања су моћни алати за оптимизацију који се широко користе у широком спектру индустрија. Они откривају најнижи (или максимум) функције итеративним ажурирањем параметара на основу правца градијента.
Због итеративне природе алгоритма, он може да обрађује просторе високе димензије и сложене функције, што га чини незаменљивим у машинском учењу и обради података.
Градијентно спуштање може лако да се ухвати у коштац са потешкоћама у стварном свету и у великој мери допринесе развоју технологије и доношења одлука заснованих на подацима пажљивим одабиром брзине учења и применом напредних варијација као што су стохастички градијентни пад и Адам.




Ostavite komentar