Spis treści[Ukryć][Pokazać]
- Czym dokładnie jest interakcja człowiek-robot?
- Jak można osiągnąć interakcję człowiek-robot?
- Dlaczego zależy nam na interakcji człowiek-robot?
- Potencjał interakcji człowiek-robot
- Tło
- Projekty interakcji człowiek-robot
- Czynniki wpływające na interakcję człowiek-robot
- Interakcja człowiek-robot w przyszłości
- Zamotać
Wraz z rozwojem technologii nasza interakcja z robotami staje się coraz bardziej intymna.
Interakcja człowiek-robot na nowo kształtuje granice ludzkiego potencjału, od sposobu komunikowania się po delegowane obowiązki.
Przyjrzyjmy się nauce stojącej za tą interakcją w tym dogłębnym badaniu podstaw interakcji człowiek-robot.
Czym dokładnie jest interakcja człowiek-robot?
Interakcja człowiek-robot opisuje, w jaki sposób ludzie i roboty wchodzą ze sobą w interakcje.
Polega na wymianie informacji i informacji zwrotnych między dwiema stronami. Jest to również kluczowy element w opracowywaniu bezpiecznych robotów dla ludzi.
Jak można osiągnąć interakcję człowiek-robot?
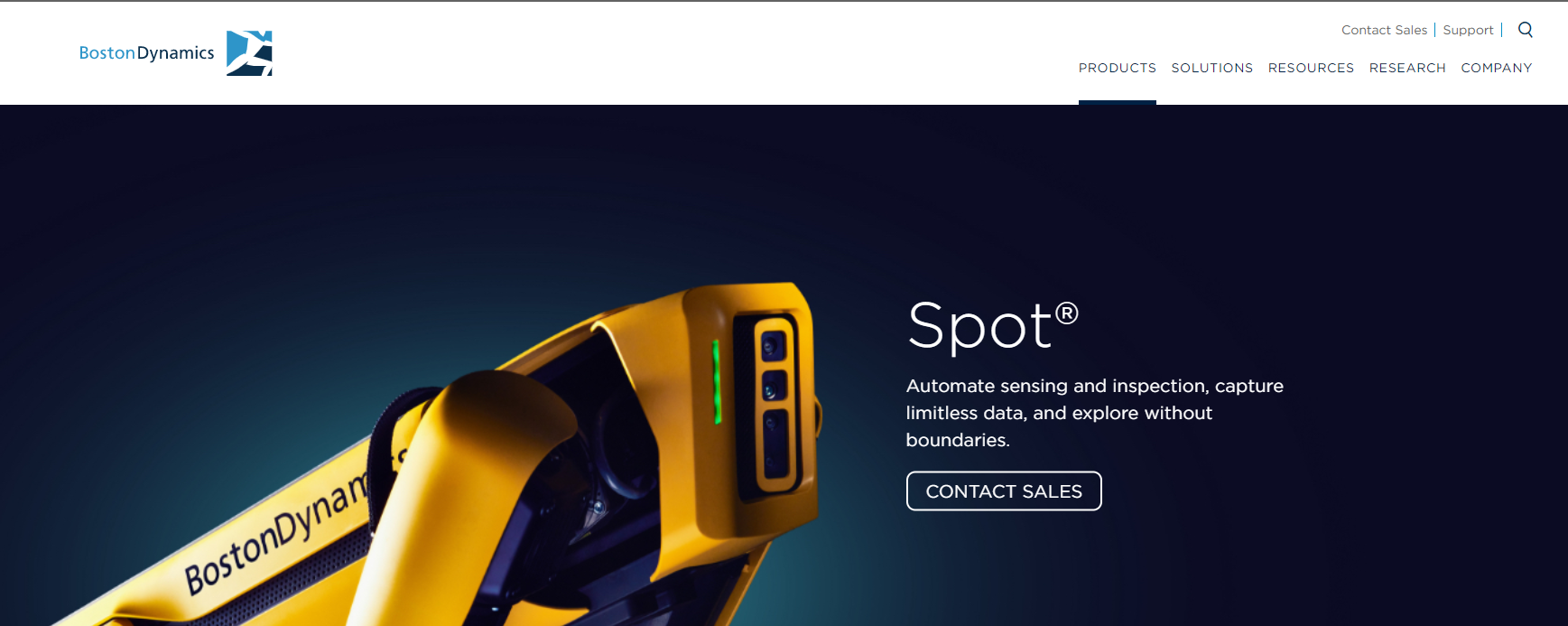
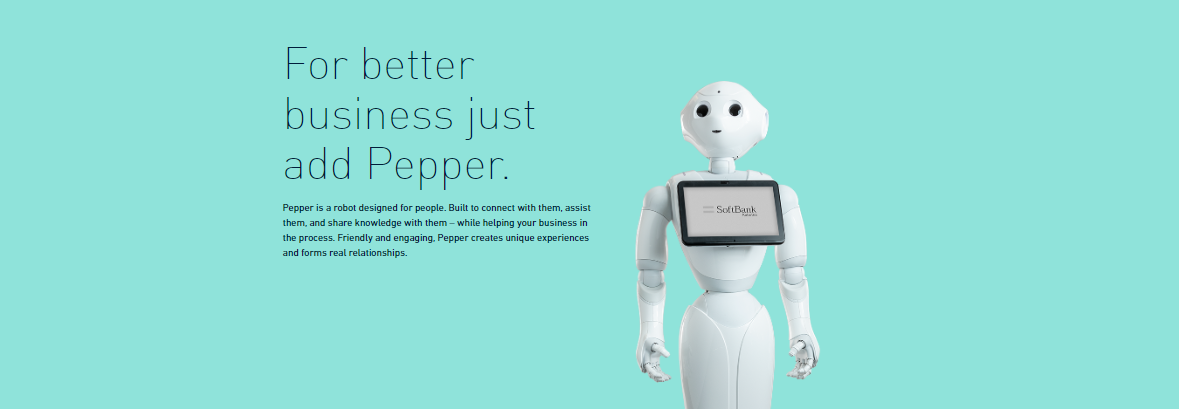
Metody interakcji człowiek-robot obejmują różne podejścia. Interakcja człowiek-robot jest rozwijana przez firmy takie jak SoftBank Robotics i Boston Dynamics. Ponadto uczelnie takie jak Carnegie Mellon University i MIT są pionierami w tej dziedzinie.
Na przykład robot Pepper firmy SoftBank Robotics wykorzystuje algorytmy sztucznej inteligencji do rozpoznawania ludzkich emocji i reagowania na nie.
Również Boston Dynamics SpotMini robot wchodzi w interakcję z otoczeniem i porusza się po nim. To tylko niektóre z innowacyjnych rozwiązań.
Dlaczego zależy nam na interakcji człowiek-robot?
Interakcja człowieka z robotem to szybko rozwijający się temat.
I zmienia sposób, w jaki myślimy o naszych interakcjach z robotami. Zasadniczo chodzi o zrozumienie systemów rządzących wzajemnymi interakcjami ludzi i robotów.
To zaangażowanie, od gestów po rozmowę, przesuwa granice tego, co wcześniej uważano za niemożliwe. Wytycza nowe ścieżki na przyszłość.
Potencjał interakcji człowiek-robot
Ponieważ roboty stają się coraz bardziej zdolne i inteligentne, będziemy mogli wykorzystywać je w coraz większej liczbie czynności. Będziemy mieć roboty działające w szpitalach, szkołach czy bankach. Im bardziej włączają się do naszego życia, tym bardziej potrzebujemy ich, aby dobrze funkcjonować w ludzkim otoczeniu.
Musimy wiedzieć więcej o tym, jak ludzie i roboty wchodzą ze sobą w interakcje.
Roboty nie są klasycznym „hollywoodzkim” obrazem metalicznych stworzeń, jak kiedyś myśleliśmy. Ewoluują i stają się coraz bardziej zgodne z ludzkim życiem. Istnieją zmiany takie jak; bioroboty, roboty społeczne, miękkie roboty... i wiele więcej.
Staramy się tworzyć roboty, które są nie tylko wydajne, ale także bezpieczne dla ludzi, z którymi mogą pracować i mieszkać obok.
Uczynienie interakcji człowiek-robot bardziej naturalną otworzy nowe możliwości w wielu branżach.
Tło
Tło interakcji człowiek-robot jest niezwykłe. We wczesnych latach robotyki były to proste urządzenia, które mogły wykonywać powtarzalne zadania. Na przykład używaliśmy robotów jako robotów na liniach montażowych w fabrykach.
W miarę postępu prac roboty stawały się coraz bardziej wrażliwe na swoje otoczenie. Wprowadzono nowe czujniki i oprogramowanie. Doprowadziło to do bardziej zniuansowanych i złożonych interakcji człowiek-robot.
Od skromnych początków po najnowocześniejsze badania, historia interakcji człowiek-robot to historia kreatywności i współpracy.
Projekty interakcji człowiek-robot
1- Podejścia zorientowane na zadania
Zdolność do wykonywania określonych zadań jest głównym celem podejścia zorientowanego na zadania. Dzięki tej metodzie optymalizuje się wydajność robota w wykonywaniu zadanych mu zadań. Ta metoda kładzie większy nacisk na wymagania techniczne i miary wydajności.
Nieco mniej ważne jest to, jak robot wchodzi w interakcje z ludźmi. Inżynierowie, którzy stosują podejście zorientowane na zadania, przywiązują dużą wagę do tego, aby robot mógł precyzyjnie wykonywać swoje zadania.
2- Podejścia, które koncentrują się na interakcji
Proces projektowania interakcji człowiek-robot wykorzystuje podejście zorientowane na interakcję. Szczególnie podkreśla sposób, w jaki robot komunikuje się z ludźmi. Ta strategia ma na celu stworzenie robotów, które mogą naturalnie wchodzić w interakcje z ludźmi.
Wiąże się to z uwzględnieniem elementów, w tym cech fizycznych robota, UIi tryby komunikacji. The doświadczenie użytkownika i zapewnienie, że robot może płynnie zintegrować się z ludzkimi kontekstami, są w centrum tej strategii.
3- Podejścia skoncentrowane na człowieku
U podstaw podejścia skoncentrowanego na człowieku leżą wymagania ludzi, którzy będą korzystać z robota.
Dzięki tej metodzie powstają roboty, które potrafią przystosować się do różnych warunków. Wiele składników uważa się za fizyczne, poznawcze i emocjonalne zachowanie człowieka.
Ta metoda koncentruje się na tworzeniu przyjaznych dla użytkownika, osiągalnych i prostych w użyciu robotów. Podsumowując, ta metoda ma na celu stworzenie robotów, które są zabawne i satysfakcjonujące.
4- Metody hybrydowe
W projektowaniu interakcji człowiek-robot metoda hybrydowa integruje komponenty z wielu podejść, aby zapewnić specjalną interakcję. Uwzględnia zarówno wymagania techniczne, jak i wrażenia użytkownika.
Uwzględniając sposób funkcjonowania robota oraz jego interakcje z ludźmi, metoda ta umożliwia projektantom wytwarzanie robotów, które są zarówno zaawansowane technologicznie, jak i przyjazne dla użytkownika.
Celem jest stworzenie równowagi między doskonałą wydajnością techniczną a pozytywnym doświadczeniem użytkownika. Technika ta umożliwia projektantom opracowywanie robotów, które są nie tylko skuteczne, ale także przyjemne i satysfakcjonujące.
Czynniki wpływające na interakcję człowiek-robot
A. Projekt robota
Powodzenie interakcji człowiek-robot w dużej mierze zależy od konstrukcji robota. To ona decyduje o tym, jak skutecznie robot będzie wykonywał obowiązki i wchodził w interakcje z ludźmi. Fizyczne cechy robota, takie jak jego kształt, rozmiar i wygląd, odgrywają ważną rolę. Te cechy mogą potencjalnie wzbudzić zaufanie u innych.
Na przykład roboty o przyjaznym wyglądzie są preferowane w opiece nad pacjentami w Japonii. To jest inny przypadek; szybko się rozwija, to miękka robotyka. Wykorzystuje elastyczne materiały w projektowaniu robotów. Roboty te mają również potencjał do obsługi pacjentów szpitalnych i opieki nad dziećmi. I ma potencjał, aby całkowicie zmienić nasze interakcje.
B. Interfejs użytkownika
Interfejs użytkownika jest ważny, ponieważ wpływa na to, jak skutecznie ludzie mogą wchodzić w interakcje z robotami. Dobrze zaprojektowany interfejs użytkownika powinien być intuicyjny. Powinien być prosty w użyciu i zapewniać użytkownikowi informacje zwrotne w czasie rzeczywistym. Konieczne jest również zbadanie rodzaju interakcji, która może być słowem, gestem, dotykiem lub ich mieszanką.
Na przykład interfejsy oparte na mowie najlepiej nadają się do robotów asystentów osobistych. Interfejsy dotykowe są lepiej dostosowane do urządzeń bionicznych.
C. Oczekiwania społeczne i kulturowe
Normy społeczne i kulturowe znacząco wpływają na interakcje człowiek-robot. Pochodzenie kulturowe i społeczne wpływa na myśli i postawy ludzi wobec robotów. Na przykład w niektórych kulturach roboty są uważane za narzędzia do wykonywania określonych zadań. W innych są postrzegani jako towarzysze, a nawet przyjaciele.
Projektanci muszą pamiętać o tych różnicach kulturowych. Mogą tworzyć roboty, które są kulturowo odpowiednie i akceptowalne.
D. Rola sztucznej inteligencji i uczenia maszynowego
Znaczenie sztucznej inteligencji i uczenie maszynowe w interakcji człowiek-robot rośnie. Sztuczna inteligencja umożliwia robotom dokonywanie ocen i uczenie się na podstawie interakcji międzyludzkich. Teraz roboty są bardziej efektywne i wydajne w interakcjach.
Algorytmy uczenia maszynowego oceniać dane z interakcji człowiek-robot. Z czasem poprawiają wydajność robota.
Interakcja człowiek-robot w przyszłości
Rozwój sztucznej inteligencji i robotyki
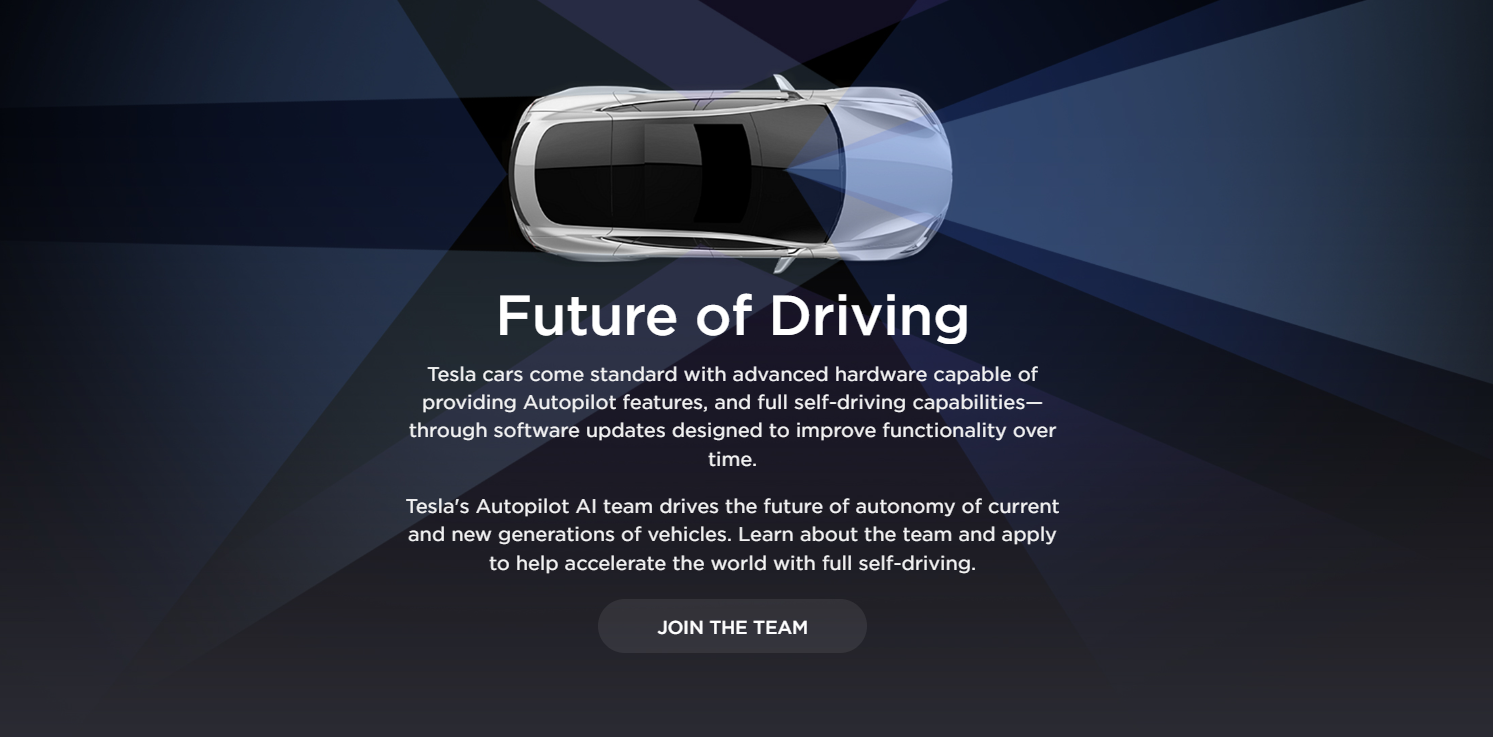
Dziedzina sztucznej inteligencji szybko się rozwija, co zmienia przyszłość robotów. Na przykład firmy takie jak Tesla i Honda tworzą samochody samojezdne. Wkrótce staną się częścią naszego codziennego życia.
Włączenie interakcji człowiek-robot do życia codziennego
Połączenie człowieka z robotem nie jest już fantazją science-fiction; staje się rzeczywistością. Roboty stopniowo stają się znajomym widokiem w naszych domach i miejscach publicznych. Mamy już osobistych asystentów domowych, takich jak Amazon Alexa i Google Home, do robotów obsługi klienta, takich jak Pieprz Softbanku.
Potencjalne wady
Istnieją potencjalne korzyści, takie jak zwiększona wydajność i wygoda. Jednak są też wady, takie jak utrata pracy. Ponadto wiele osób jest zaniepokojonych aspektami etycznymi, takimi jak prywatność i bezpieczeństwo.
Względy etyczne dotyczące przyszłości kontaktu człowiek-robot
Należy zająć się kwestiami etycznymi, takimi jak właściwe wykorzystanie sztucznej inteligencji, prywatność danych i odpowiedzialne tworzenie systemów autonomicznych. Firmy takie jak OpenAI są pionierami w badaniu problemów etycznych w sztucznej inteligencji i robotyce.
Zamotać
Ulepszenia w interakcji człowiek-robot mogą potencjalnie zmienić sposób, w jaki żyjemy. Oczekujemy również bardziej zrównoważonej produkcji robotów.
Roboty z materiałów nadających się do recyklingu lub wykonujące działania przyjazne dla środowiska są bardzo obiecujące. Poprawa interakcji człowiek-robot może skutkować wydajniejszymi procedurami. Może nam również pomóc w poprawie warunków pracy.
Przyszłość już tu jest i uważamy, że jest bardzo ekscytująca.





Dodaj komentarz