当您想到特斯拉时,您可能会认为特斯拉是汽车行业的知名品牌。 毫无疑问,特斯拉是电动汽车的先驱。 然而,他们是一家技术公司,这也是他们成功的秘诀。
使他们的业务成功的一件事是使用 人工智能 技术。 特斯拉车辆的完全自动化是该公司当前的首要任务之一,为了实现这一目标,他们正在利用人工智能及其许多组件。
通过宣布它在 2021 年初的到来, 特斯拉 在次大陆引起了轰动。 埃隆马斯克几乎准备好将印度班加罗尔建立为特斯拉印度的制造中心。
随着关于备受赞誉的“自动驾驶汽车”将如何在印度运行的模因和推文继续出现,印度的人工智能专家欢呼雀跃。
一波最终将统治全球的人工智能浪潮才刚刚开始。
这篇文章将深入探讨特斯拉如何将人工智能集成到其系统中,包括细节和其他信息。
那么,人工智能如何教汽车自动驾驶?
自动驾驶汽车 不断分析来自传感器和机器视觉相机的数据,以便能够独立驾驶。 然后他们利用这些数据来决定下一步做什么。
他们使用人工智能来理解和预测自行车、行人和汽车的下一步动作。 他们可以使用这些信息来快速计划他们的行动并做出瞬间决定。
汽车应该继续在当前车道上行驶还是应该切换车道? 它应该继续原地行驶还是通过他们面前的汽车? 车辆什么时候应该减速或加速?
特斯拉必须收集适当的数据来训练算法并为其 AI 提供数据,以使汽车完全自动驾驶。 更好的性能总是来自更多的训练数据,而特斯拉在这方面大放异彩。
特斯拉将其所有数据从数十万辆正在上路的特斯拉车辆中众包出来,这一事实赋予了他们竞争优势。 内部和外部传感器都跟踪特斯拉在各种情况下的行为。

他们还收集有关驾驶员行为的信息,包括他们对某些情况的反应以及他们触摸方向盘或仪表板的频率。
“模仿学习”是特斯拉战略的名称。 全世界数以百万计的真实驾驶员做出判断、响应和移动,他们的算法从这些动作中学习。 所有这些公里造就了极其复杂的自动驾驶汽车。
他们的跟踪系统非常先进。 例如,特斯拉存储了当时的数据快照,将其添加到数据集中,然后使用颜色编码的形状重新创建世界的抽象表示, 神经网络 可以借鉴。 当特斯拉汽车错误地预测汽车或自行车的行为时,就会发生这种情况。
其他开发自动驾驶汽车的企业依赖 综合数据,这比特斯拉用来训练其 AI 的真实数据(例如,侠盗猎车手等视频游戏的驾驶行为)的效果要差得多。
我们现在将研究利用人工智能的特斯拉组件。
利用人工智能的特斯拉组件
相机和传感器
特斯拉必须完成的责任是众所周知的。 所有这些操作,从车道识别到行人跟踪,都是实时进行的。 出于这个原因,特斯拉在 8 个摄像头的帮助下运作。 此外,这么多摄像头的存在确保没有盲区,并且汽车周围的整个区域都被覆盖。
你刚刚读到的是真的! 没有激光雷达 没有用于高清测绘的系统。 特斯拉只想使用计算机视觉, 机器学习,以及用于创建自动驾驶模型的摄像头视频源。 然后使用卷积神经网络 (CNN) 分析原始视频,以便跟踪和 检测物体.
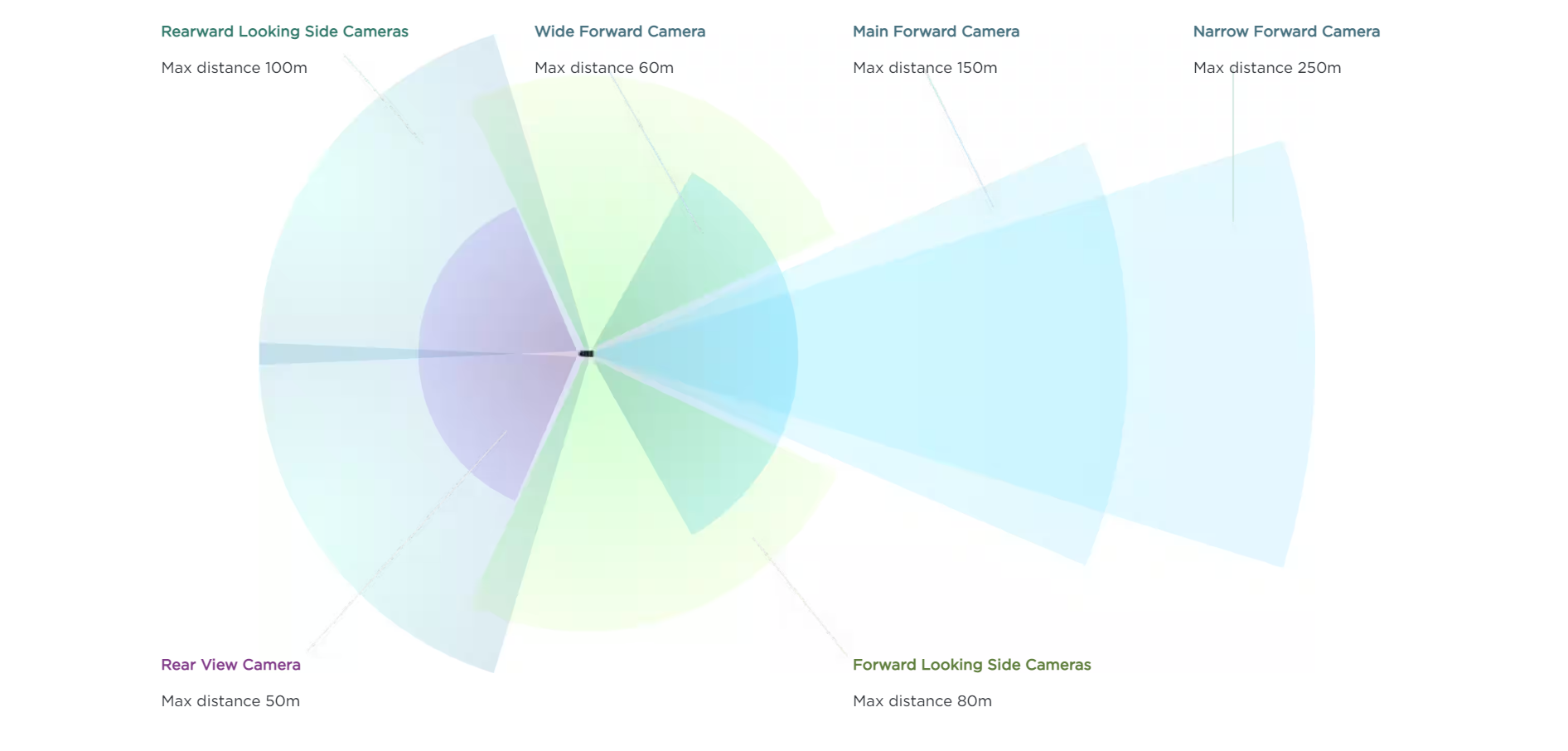
特斯拉自动驾驶仪 除了摄像头外,还有雷达和超声波传感器。 雷达用于检测和测量车辆与其他物体之间的距离。 为了优化驾驶员的安全性,超声波传感器还可以根据与被动物体的接近程度进行监控。
为了了解汽车的周围环境并使自动驾驶功能尽可能响应,神经网络与特斯拉硬件集成。
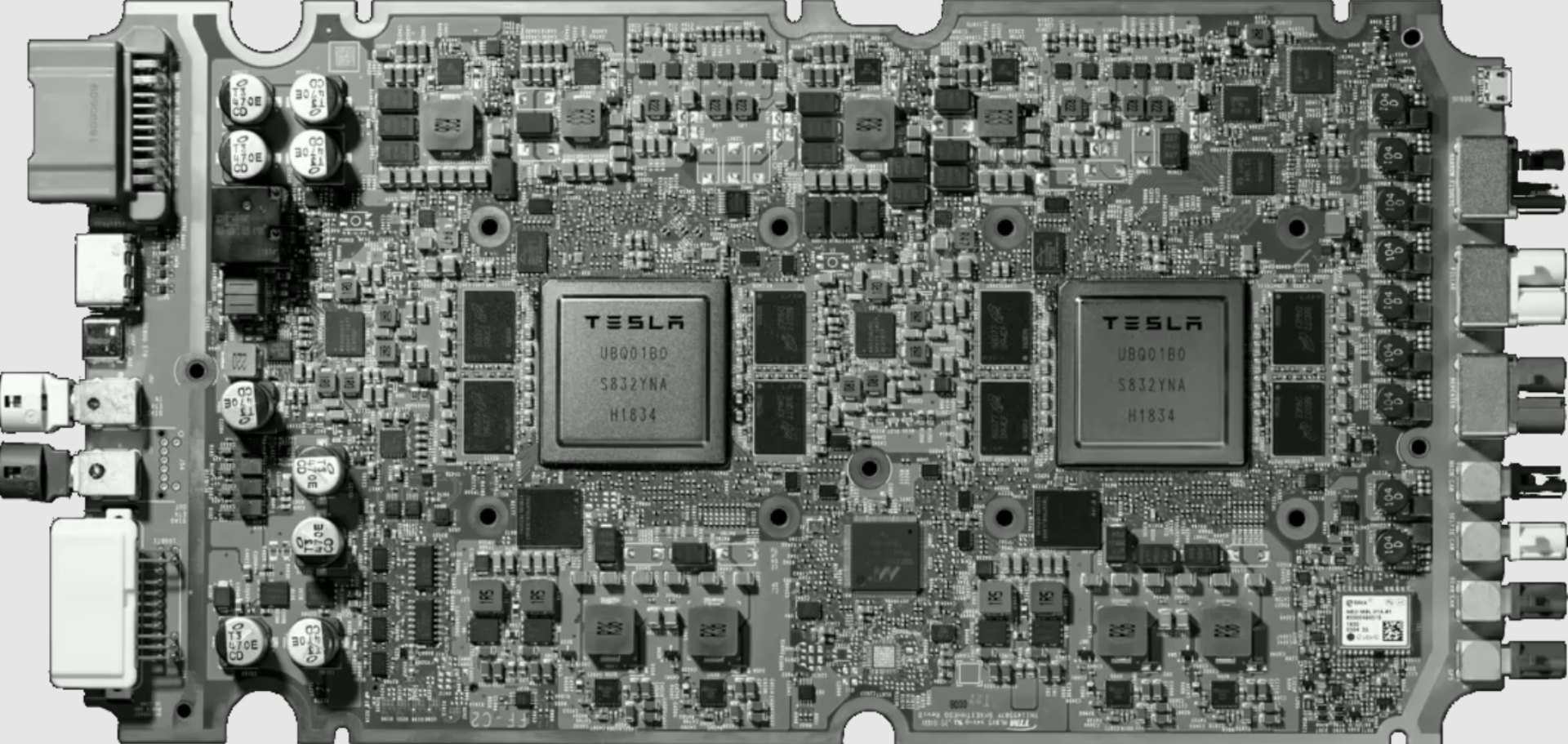
特斯拉FSD芯片-3
为了提高道路性能和安全性,特斯拉系统包括两个人工智能处理器。 特斯拉系统力求做到无错误。 即使一个单元发生故障,由于备用电源和数据输入源,汽车仍然可以使用额外的单元运行。
特斯拉使用这些额外措施来确保汽车装备精良,以避免在发生意外故障时发生碰撞。 只有 人类的大脑 每秒可以执行比新的 Tesla 微处理器更多的操作(每秒 1 万亿次操作)。 这比之前使用的 Tesla Nvidia 微芯片强 21 倍。
Tesla 无疑是全自动机车的市场领导者,但距离生产尖端的自动驾驶汽车还有很长的路要走。
未来,具有我们在本文中概述的品质的汽车无疑将变得司空见惯。 特斯拉已经创建了自己的尖端人工智能处理器和神经网络架构。
神经网络训练
模型还必须在神经网络之后进行训练 已创建。 我们知道,特斯拉已经部署了广泛的库和工具,以实现尖端的计算机视觉功能。
火炬由 Facebook 的 AI 研究部门创建的,就是这样一个框架 (FAIR)。 PyTorch 被 特斯拉技术栈 训练深度学习模型。
值得注意的是,特斯拉并不依赖地图或激光雷达来实现完全自主。 相机和纯计算机视觉是专门使用的,一切都是实时完成的。
特斯拉使用 Pytorch 进行培训以及各种辅助活动,例如 自动工作流程 调度、模型阈值校准、全面评估、被动测试、模拟测试等。
Tesla 花费了大约 70,000 个 GPU 小时来训练 48 个网络,从而做出 1,000 个不同的预测。 这种培训正在进行中,而不仅仅是一次。 我们知道,人工智能是一个随着时间推移而不断进步的迭代过程。 因此,所有 1000 个单独的预测都保持准确,从未动摇。
九头蛇网
在任何给定时间,大约有 100 个工作正在进行中,即使汽车没有移动并且很可能处于十字路口。 为每项任务使用神经网络既昂贵又无效。 特斯拉汽车中的人工智能实时处理大量信息。
因此,可以一次处理 50 x 1000 图片的 ResNet-1000 共享主干用作计算机视觉工作流程的中央处理单元。
在网络顶部附近,HydraNet 神经网络设计分为几个分支(或头)。 通过让每个微批次的训练数据对许多头部进行不同的加权,这些头部被独立地教授并学习不同的东西。
当然,这些 HydraNet 有几个实例协同工作来处理车辆的 AI。 每个 HydraNet 的信息都用于解决反复出现的问题。
例如,一个任务可以主动处理停车标志,另一个可以处理行人,另一个可以检查交通信号。 这些不同的职责都由一个共同的骨干运营。
根据 HydraNet 架构,每个任务只需要庞大神经网络的一小部分。
这与迁移学习非常相似,其中针对某些相关任务的公共块训练不同的块。 HydraNets 的主干接受过各种各样的培训,而负责人则接受特定工作的培训。
这减少了训练模型所需的时间并加快了推理速度。
特斯拉自动驾驶仪
具有自动驾驶功能的汽车可以在车道上自主转向、加速和停止。 它是使用深度神经网络概念构建的。 它使用摄像头、超声波传感器和雷达观察汽车周围的区域。
驾驶员通过传感器和摄像头了解周围环境,并在几毫秒内对这些信息进行分析,以帮助使驾驶更安全、压力更小。
在明亮、黑暗和各种天气情况下,利用雷达来观察和估计汽车周围的空间。 在任何情况下,紫外线方法都会确定距离,被动视频可以识别附近的物体并促进安全驾驶。

此外,自动驾驶仪旨在帮助驾驶员,不会将特斯拉变成自动驾驶汽车。 通常的做法是警告司机把手放在方向盘上。
如果您不这样做,则会触发一系列提醒您驾驶方向盘。 如果长时间忽视,汽车会在停下之前开始减速。 通过制动、转动或停用巡航控制杆,驾驶员始终可以超越自动驾驶功能。
鸟瞰图
特斯拉硬件解释的图片通常可能需要额外的尺寸。 鸟瞰图功能可以更轻松地测量更远的距离,并提供更准确的外部世界表示。

它是一种视觉监控系统,可以“渲染”汽车的俯视图,使停车更简单,在小地方导航更容易。 无需为您的停车能力提供蹩脚的理由,您现在可以安全地驾驶方向盘。
特斯拉的未来
如果您正在寻找具有强劲续航里程的中型 SUV, 2022年特斯拉Model Y 是电动汽车的绝佳起点。 由于定期进行软件升级,Model Y 不断变化,就像特斯拉的许多其他产品一样。
通过增强安全性和功能性,这些升级可帮助您的汽车变得更加有用。 对于需要携带家人和各种行李长途旅行的人来说,宽敞的车身和特斯拉超级充电网络的接入使其成为绝佳的选择。

自成立以来,特斯拉就从其当前客户群的数据中受益,其在自动驾驶汽车方面的工作是其将人工智能置于其所有运营核心的持续雄心的一部分。
人工智能和大数据将继续成为 Elon Musk 和他在特斯拉忠实盟友的团队,因为他们正在推进他们的最新举措,包括他们希望通过家用太阳能电池板改造电网的愿望。
结论
特斯拉是一家被公认为市场上最激进的创新者之一的公司,它一直将数据收集和分析作为其最强大的工具。 在创建自己的芯片时,他们遵循相同的规则。
该公司开发的自动驾驶汽车有可能通过人工智能和数据分析彻底改变我们驾驶汽车的方式。
让我们看看该平台如何兑现其承诺并发展其业务。 在利用这些技术后,该公司未来将在自动驾驶汽车市场上走向何方还有待观察。




发表评论