Vi möter optimeringsproblem i många verkliga omständigheter där vi måste identifiera minimum eller maximum för en funktion.
Betrakta en funktion som en matematisk representation av ett system, och att fastställa dess minimum eller maximum kan vara avgörande för en mängd olika applikationer som maskininlärning, teknik, ekonomi och andra.
Tänk på ett landskap med kullar och dalar, och vårt mål är att hitta den lägsta punkten (minst) för att komma till vårt mål så snabbt som möjligt.
Vi använder ofta gradient descent-algoritmer för att lösa sådana optimeringsutmaningar. Dessa algoritmer är iterativa optimeringsmetoder för att minimera en funktion genom att ta steg i riktning mot den brantaste nedstigningen (negativ gradient).
Gradienten reflekterar riktningen med den brantaste ökningen av funktionen, och färd i motsatt riktning leder oss till minimum.
Vad exakt är Gradient Descent Algorithm?
Gradient descent är en populär iterativ optimeringsmetod för att bestämma minimum (eller maximum) för en funktion.
Det är ett kritiskt verktyg inom flera områden, inklusive maskininlärning, djupinlärning, artificiell intelligens, teknik och ekonomi.
Algoritmens grundprincip bygger på dess användning av gradienten, som visar riktningen för den skarpaste ökningen av funktionens värde.
Algoritmen navigerar effektivt funktionens landskap mot ett minimum genom att upprepade gånger ta steg i motsatt riktning som gradienten, och iterativt förfina lösningen tills den konvergens.
Varför använder vi Gradient Descent Algorithms?
Till att börja med kan de användas för att lösa ett brett utbud av optimeringsproblem, inklusive de med högdimensionella utrymmen och komplexa funktioner.
För det andra kan de hitta optimala lösningar snabbt, särskilt när den analytiska lösningen är otillgänglig eller beräkningsmässigt dyr.
Gradient descent-tekniker är mycket skalbara och kan framgångsrikt hantera enorma datamängder.
Som ett resultat används de flitigt i maskininlärningsalgoritmer som att träna neurala nätverk för att lära av data och modifiera deras parametrar för att minimera förutsägelsemisstag.
Ett detaljerat exempel på gradientnedstigningssteg
Låt oss titta på ett mer detaljerat exempel för att få en bättre förståelse för tekniken för gradientnedstigning.
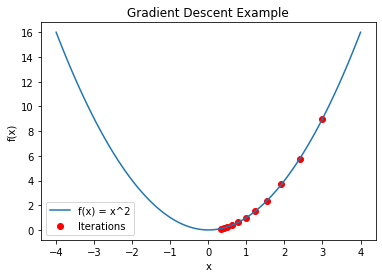
Betrakta 2D-funktionen f(x) = x2, som genererar en grundläggande parabolkurva med ett minimum vid (0,0). Gradient descent-algoritmen kommer att användas för att bestämma denna minimala punkt.
Steg 1: Initiering
Gradientnedstigningsalgoritmen börjar med att initiera värdet på variabeln x, representerad som x0.
Det initiala värdet kan ha en betydande inverkan på algoritmens prestanda.
Slumpmässig initiering eller att använda förkunskaper om problemet är två vanliga tekniker. Antag att x₀ = 3 i början av vårt fall.
Steg 2: Beräkna gradienten
Gradienten för funktionen f(x) vid den aktuella positionen x₀. måste då beräknas.
Gradienten indikerar lutningen eller förändringshastigheten för funktionen vid den specifika positionen.
Vi beräknar derivatan för x för funktionen f(x) = x2, vilket ger f'(x) = 2x. Vi får gradienten vid x0 som 2 * 3 = 6 genom att ersätta x₀ = 3 i gradientberäkningen.
Steg 3: Uppdatera parametrar
Med hjälp av gradientinformationen uppdaterar vi värdet på x enligt följande: x = x₀ – α * f'(x₀), där α (alfa) anger inlärningshastigheten.
Inlärningshastigheten är en hyperparameter som bestämmer storleken på varje steg i uppdateringsprocessen. Att ställa in en lämplig inlärningshastighet är avgörande eftersom en långsam inlärningshastighet kan orsaka algoritm att ta för många repetitioner för att nå minimum.
En hög inlärningshastighet kan å andra sidan resultera i att algoritmen studsar eller misslyckas med att konvergera. Låt oss anta en inlärningshastighet på α = 0.1 för detta exempel.
Steg 4: Iterera
Efter att vi har det uppdaterade värdet på x upprepar vi steg 2 och 3 för ett förutbestämt antal iterationer eller tills förändringen i x blir minimal, vilket indikerar konvergens.
Metoden beräknar gradienten, uppdaterar värdet på x och fortsätter proceduren vid varje iteration, så att den kan komma närmare minimum.
Steg 5: Konvergens
Tekniken konvergerar efter några iterationer till en punkt där ytterligare uppdateringar inte väsentligt påverkar funktionens värde.
I vårt fall, när iterationerna fortsätter, kommer x att närma sig 0, vilket är minimivärdet på f(x) = x^2. Antalet iterationer som krävs för konvergens bestäms av faktorer såsom den valda inlärningshastigheten och komplexiteten hos den funktion som optimeras.
Välja inlärningshastighet ()
Att välja en acceptabel inlärningshastighet () är avgörande för gradient-descentalgoritmens effektivitet. Som tidigare nämnts kan en låg inlärningshastighet inducera långsam konvergens, medan en hög inlärningshastighet kan orsaka överskridande och misslyckande att konvergera.
Att hitta rätt balans är avgörande för att säkerställa att algoritmen konvergerar till det avsedda minimumet så effektivt som möjligt.
Att justera inlärningshastigheten är ofta ett försök-och-fel-förfarande i praktiken. Forskare och praktiker experimenterar rutinmässigt med olika inlärningshastigheter för att se hur de påverkar algoritmens konvergens på deras specifika utmaning.
Hantering av icke-konvexa funktioner
Även om det föregående exemplet hade en enkel konvex funktion, involverar många verkliga optimeringsproblem icke-konvexa funktioner med många lokala minima.
När man använder gradientnedstigning i sådana fall kan metoden konvergera till ett lokalt minimum snarare än det globala minimumet.
Flera avancerade former av gradientnedstigning har utvecklats för att övervinna detta problem. Stochastic Gradient Descent (SGD) är en sådan metod som introducerar slumpmässighet genom att välja en slumpmässig delmängd av datapunkter (känd som en mini-batch) för att beräkna gradienten vid varje iteration.
Detta slumpmässiga urval gör att algoritmen kan undvika lokala minima och utforska nya delar av funktionens terräng, vilket ökar chanserna att upptäcka ett bättre minimum.
Adam (Adaptive Moment Estimation) är en annan framträdande variant, som är en adaptiv inlärningshastighetsoptimering som inkluderar fördelarna med både RMSprop och momentum.
Adam ändrar inlärningshastigheten för varje parameter dynamiskt baserat på tidigare gradientinformation, vilket kan resultera i bättre konvergens för icke-konvexa funktioner.
Dessa sofistikerade gradientnedstigningsvariationer har visat sig vara effektiva för att hantera allt mer komplexa funktioner och har blivit standardverktyg inom maskininlärning och djupinlärning, där icke-konvexa optimeringsproblem är vanliga.
Steg 6: Visualisera dina framsteg
Låt oss se framstegen för algoritmen för gradientnedstigning för att få en bättre förståelse av dess iterativa process. Betrakta en graf med en x-axel som representerar iterationer och en y-axel som representerar värdet på funktionen f(x).
När algoritmen itererar närmar sig värdet på x noll och som ett resultat sjunker funktionsvärdet för varje steg. När det ritas på en graf, skulle detta uppvisa en distinkt minskande trend, vilket återspeglar algoritmens framsteg mot att nå minimum.
Steg 7: Finjustera inlärningshastigheten
Inlärningshastigheten () är en viktig faktor för algoritmens prestanda. I praktiken kräver att bestämma den ideala inlärningshastigheten ofta försök och misstag.
Vissa optimeringstekniker, såsom inlärningshastighetsscheman, kan ändra inlärningshastigheten dynamiskt under träningen, med början med ett högre värde och gradvis minska det när algoritmen närmar sig konvergens.
Denna metod hjälper till att hitta en balans mellan snabb utveckling i början och stabilitet mot slutet av optimeringsprocessen.
Ett annat exempel: Minimera en kvadratisk funktion
Låt oss titta på ett annat exempel för att få en bättre förståelse för gradientnedstigning.
Betrakta den tvådimensionella kvadratiska funktionen g(x) = (x – 5)^2. Vid x = 5 har även denna funktion ett minimum. För att hitta detta minimum ska vi tillämpa gradientnedstigning.
1. Initialisering: Låt oss börja med x0 = 8 som utgångspunkt.
2. Beräkna gradienten för g(x): g'(x) = 2(x – 5). När vi ersätter x0 = 8 är gradienten vid x0 2 * (8 – 5) = 6.
3. Med = 0.2 som vår inlärningshastighet uppdaterar vi x enligt följande: x = x₀ – α * g'(x₀) = 8 – 0.2 * 6 = 6.8.
4. Iterera: Vi upprepar steg 2 och 3 så många gånger som behövs tills konvergens uppnås. Varje cykel för x närmare 5, det minimala värdet av g(x) = (x – 5)2.
5. Konvergens: Metoden kommer så småningom att konvergera till x = 5, vilket är det minimala värdet av g(x) = (x – 5)2.
Jämförelse av lärandepriser
Låt oss jämföra konvergenshastigheten för gradientnedstigning för olika inlärningshastigheter, säg α = 0.1, α = 0.2 och α = 0.5 i vårt nya exempel. Vi kan se att en lägre inlärningshastighet (t.ex. = 0.1) kommer att resultera i en längre konvergens men ett mer exakt minimum.
En högre inlärningshastighet (t.ex. = 0.5) kommer att konvergera snabbare men kan överskrida eller svänga runt minimum, vilket resulterar i sämre noggrannhet.
Ett multimodalt exempel på icke-konvex funktionshantering
Betrakta h(x) = sin(x) + 0.5x, en icke-konvex funktion.
Det finns flera lokala minima och maxima för denna funktion. Beroende på startpositionen och inlärningshastigheten kan vi konvergera till vilket som helst av de lokala minima med standardgradientnedstigning.
Vi kan lösa detta genom att använda mer avancerade optimeringstekniker som Adam eller stochastic gradient descent (SGD). Dessa metoder använder adaptiva inlärningshastigheter eller slumpmässigt urval för att utforska olika regioner av funktionens landskap, vilket ökar sannolikheten för att uppnå ett bättre minimum.
Slutsats
Gradient descent-algoritmer är kraftfulla optimeringsverktyg som används flitigt i en mängd olika branscher. De upptäcker den lägsta (eller maximala) av en funktion genom att iterativt uppdatera parametrar baserat på gradientens riktning.
På grund av algoritmens iterativa natur kan den hantera högdimensionella utrymmen och komplexa funktioner, vilket gör den oumbärlig vid maskininlärning och databehandling.
Gradientnedstigning kan enkelt tackla verkliga svårigheter och i hög grad bidra till tillväxten av teknik och datadrivet beslutsfattande genom att noggrant välja inlärningshastighet och tillämpa avancerade variationer som stokastisk gradientnedstigning och Adam.




Kommentera uppropet