V mnohých reálnych situáciách čelíme problémom s optimalizáciou, keď potrebujeme identifikovať minimum alebo maximum funkcie.
Funkciu považujte za matematickú reprezentáciu systému a určenie jej minima alebo maxima môže byť rozhodujúce pre rôzne aplikácie, ako je strojové učenie, inžinierstvo, financie a iné.
Zoberme si krajinu s kopcami a údoliami a naším cieľom je nájsť najnižší bod (minimum), aby sme sa čo najrýchlejšie dostali do cieľa.
Na riešenie takýchto optimalizačných výziev často používame gradientové zostupové algoritmy. Tieto algoritmy sú iteratívne optimalizačné metódy na minimalizáciu funkcie vykonaním krokov v smere najstrmšieho klesania (negatívny gradient).
Gradient odráža smer s najstrmším nárastom funkcie a jazda v opačnom smere nás vedie k minimu.
Čo presne je gradientový zostupový algoritmus?
Zostup gradientu je populárny iteratívny optimalizačný prístup na určenie minima (alebo maxima) funkcie.
Je to kritický nástroj v niekoľkých oblastiach, vrátane strojové učenie, hlboké vzdelávanie, umelá inteligencia, inžinierstvo a financie.
Základný princíp algoritmu je založený na použití gradientu, ktorý zobrazuje smer najprudšieho nárastu hodnoty funkcie.
Algoritmus efektívne naviguje krajinu funkcie smerom k minimu tým, že opakovane robí kroky v opačnom smere ako je gradient, čím iteračne spresňuje riešenie až do konvergencie.
Prečo používame gradientové zostupové algoritmy?
Na začiatok ich možno použiť na riešenie širokej škály optimalizačných problémov vrátane tých s vysokorozmernými priestormi a zložitými funkciami.
Po druhé, môžu rýchlo nájsť optimálne riešenia, najmä ak je analytické riešenie nedostupné alebo výpočtovo drahé.
Techniky gradientového zostupu sú vysoko škálovateľné a dokážu úspešne zvládnuť obrovské množiny údajov.
V dôsledku toho sú široko používané v algoritmy strojového učenia ako trénovanie neurónových sietí, aby sa učili z údajov a upravovali ich parametre, aby sa minimalizovali chyby predikcie.
Podrobný príklad krokov gradientového zostupu
Pozrime sa na podrobnejší príklad, aby sme lepšie pochopili techniku gradientového zostupu.
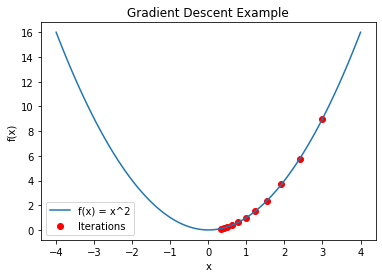
Uvažujme 2D funkciu f(x) = x2, ktorá generuje základnú parabolickú krivku s minimom v (0,0). Na určenie tohto minimálneho bodu sa použije gradientový zostupový algoritmus.
Krok 1: Inicializácia
Algoritmus zostupu gradientu začína inicializáciou hodnoty premennej x, reprezentovanej ako x0.
Počiatočná hodnota môže mať značný vplyv na výkon algoritmu.
Náhodná inicializácia alebo využitie predchádzajúcej znalosti problému sú dve bežné techniky. Predpokladajme, že x₀ = 3 na začiatku nášho prípadu.
Krok 2: Vypočítajte gradient
Gradient funkcie f(x) v súčasnej polohe x₀. treba potom vypočítať.
Gradient označuje sklon alebo rýchlosť zmeny funkcie v danej konkrétnej polohe.
Vypočítame deriváciu týkajúcu sa x pre funkciu f(x) = x2, ktorá poskytuje f'(x) = 2x. Gradient pri x0 dostaneme ako 2 * 3 = 6 dosadením x₀ = 3 do výpočtu gradientu.
Krok 3: Aktualizujte parametre
Pomocou informácie o gradiente aktualizujeme hodnotu x takto: x = x₀ – α * f'(x₀), kde α (alfa) označuje rýchlosť učenia.
Rýchlosť učenia je hyperparameter, ktorý určuje veľkosť každého kroku v procese aktualizácie. Nastavenie vhodnej rýchlosti učenia je kľúčové, pretože pomalá rýchlosť učenia môže spôsobiť algoritmus vykonať príliš veľa opakovaní na dosiahnutie minima.
Na druhej strane vysoká rýchlosť učenia môže viesť k tomu, že algoritmus poskakuje alebo nekonverguje. Pre tento príklad predpokladajme rýchlosť učenia α = 0.1.
Krok 4: Opakujte
Keď máme aktualizovanú hodnotu x, zopakujeme kroky 2 a 3 pre vopred určený počet iterácií alebo dovtedy, kým sa zmena x nestane minimálnou, čo naznačuje konvergenciu.
Metóda vypočíta gradient, aktualizuje hodnotu x a pokračuje v procedúre pri každej iterácii, čo jej umožňuje priblížiť sa k minimu.
Krok 5: Konvergencia
Táto technika po niekoľkých iteráciách konverguje do bodu, kedy ďalšie aktualizácie nemajú podstatný vplyv na hodnotu funkcie.
V našom prípade, keď iterácie pokračujú, x sa priblíži k 0, čo je minimálna hodnota f(x) = x^2. Počet iterácií potrebných na konvergenciu je určený faktormi, ako je zvolená rýchlosť učenia a zložitosť funkcie, ktorá sa má optimalizovať.
Výber miery učenia ()
Výber prijateľnej rýchlosti učenia () je rozhodujúci pre účinnosť algoritmu zostupu gradientu. Ako už bolo uvedené, nízka miera učenia môže vyvolať pomalú konvergenciu, zatiaľ čo vysoká miera učenia môže spôsobiť prekročenie a zlyhanie konvergencie.
Nájdenie správnej rovnováhy je rozhodujúce pre zabezpečenie toho, aby sa algoritmus čo najefektívnejšie priblížil k zamýšľanému minimu.
Ladenie rýchlosti učenia je v praxi často postup pokus-omyl. Výskumníci a praktici bežne experimentujú s rôznymi rýchlosťami učenia, aby zistili, ako ovplyvňujú konvergenciu algoritmu pri ich konkrétnej výzve.
Manipulácia s nekonvexnými funkciami
Zatiaľ čo predchádzajúci príklad mal jednoduchú konvexnú funkciu, veľa problémov s optimalizáciou v reálnom svete zahŕňa nekonvexné funkcie s mnohými lokálnymi minimami.
Pri použití zostupu gradientu v takýchto prípadoch môže metóda konvergovať skôr k lokálnemu minimu ako k globálnemu minimu.
Na prekonanie tohto problému bolo vyvinutých niekoľko pokročilých foriem gradientového zostupu. Stochastic Gradient Descent (SGD) je jednou z takýchto metód, ktorá zavádza náhodnosť výberom náhodnej podmnožiny údajových bodov (známych ako mini-dávka) na výpočet gradientu pri každej iterácii.
Toto náhodné vzorkovanie umožňuje algoritmu vyhnúť sa miestnym minimám a preskúmať nové časti terénu funkcie, čím sa zvýši šanca na objavenie lepšieho minima.
Adam (Adaptive Moment Estimation) je ďalšou výraznou variáciou, ktorá predstavuje adaptívny prístup k optimalizácii rýchlosti učenia, ktorý zahŕňa výhody RMSprop aj hybnosti.
Adam upravuje rýchlosť učenia pre každý parameter dynamicky na základe predchádzajúcich informácií o gradiente, čo môže viesť k lepšej konvergencii na nekonvexných funkciách.
Tieto sofistikované variácie gradientu sa ukázali ako účinné pri zvládaní čoraz zložitejších funkcií a stali sa štandardnými nástrojmi v strojovom učení a hlbokom učení, kde sú bežné problémy s nekonvexnou optimalizáciou.
Krok 6: Vizualizujte svoj pokrok
Pozrime sa na priebeh gradientového zostupového algoritmu, aby sme lepšie porozumeli jeho iteračnému procesu. Uvažujme graf s osou x predstavujúcou iterácie a osou y predstavujúcou hodnotu funkcie f(x).
Ako algoritmus iteruje, hodnota x sa blíži k nule a v dôsledku toho hodnota funkcie každým krokom klesá. Pri vynesení do grafu by to vykazovalo zreteľný klesajúci trend, ktorý odráža pokrok algoritmu smerom k dosiahnutiu minima.
Krok 7: Jemné doladenie rýchlosti učenia
Rýchlosť učenia () je dôležitým faktorom výkonu algoritmu. V praxi si určenie ideálnej rýchlosti učenia často vyžaduje pokusy a omyly.
Niektoré optimalizačné techniky, ako napríklad rozvrhy rýchlosti učenia, môžu počas tréningu dynamicky meniť rýchlosť učenia, počnúc vyššou hodnotou a postupne ju znižovať, keď sa algoritmus blíži ku konvergencii.
Táto metóda pomáha nájsť rovnováhu medzi rýchlym vývojom na začiatku a stabilitou na konci procesu optimalizácie.
Ďalší príklad: Minimalizácia kvadratickej funkcie
Pozrime sa na ďalší príklad, aby sme lepšie pochopili gradientný zostup.
Uvažujme dvojrozmernú kvadratickú funkciu g(x) = (x – 5)^2. Pri x = 5 má táto funkcia tiež minimum. Aby sme našli toto minimum, použijeme gradientný zostup.
1. Inicializácia: Začnime s x0 = 8 ako východiskovým bodom.
2. Vypočítajte gradient g(x): g'(x) = 2(x – 5). Keď dosadíme x0 = 8, gradient na x0 je 2 * (8 – 5) = 6.
3. S = 0.2 ako našou rýchlosťou učenia aktualizujeme x takto: x = x₀ – α * g'(x₀) = 8 – 0.2 * 6 = 6.8.
4. Opakujeme: Opakujeme kroky 2 a 3 toľkokrát, koľkokrát je potrebné, kým nedosiahneme konvergenciu. Každý cyklus približuje x k 5, čo je minimálna hodnota g(x) = (x – 5)2.
5. Konvergencia: Metóda bude nakoniec konvergovať k x = 5, čo je minimálna hodnota g(x) = (x – 5)2.
Porovnanie kurzov učenia
Porovnajme rýchlosť konvergencie zostupu gradientu pre rôzne rýchlosti učenia, povedzme α = 0.1, α = 0.2 a α = 0.5 v našom novom príklade. Môžeme vidieť, že nižšia miera učenia (napr. = 0.1) bude mať za následok dlhšiu konvergenciu, ale presnejšie minimum.
Vyššia rýchlosť učenia (napr. = 0.5) bude konvergovať rýchlejšie, ale môže presiahnuť alebo oscilovať okolo minima, čo má za následok horšiu presnosť.
Multimodálny príklad spracovania nekonvexných funkcií
Uvažujme h(x) = sin(x) + 0.5x, nekonvexnú funkciu.
Pre túto funkciu existuje niekoľko lokálnych miním a maxím. V závislosti od východiskovej pozície a rýchlosti učenia sa môžeme pomocou štandardného gradientového zostupu konvergovať k akémukoľvek z miestnych miním.
Môžeme to vyriešiť pomocou pokročilejších optimalizačných techník, ako je Adam alebo stochastický gradientový zostup (SGD). Tieto metódy využívajú adaptívnu rýchlosť učenia alebo náhodné vzorkovanie na preskúmanie rôznych oblastí krajiny funkcie, čím sa zvyšuje pravdepodobnosť dosiahnutia lepšieho minima.
záver
Algoritmy zostupu gradientu sú výkonné optimalizačné nástroje, ktoré sa široko používajú v širokej škále priemyselných odvetví. Objavia najnižšiu (alebo maximum) funkcie iteratívnym aktualizovaním parametrov na základe smeru gradientu.
Vzhľadom na iteratívnu povahu algoritmu dokáže zvládnuť vysokorozmerné priestory a zložité funkcie, vďaka čomu je nevyhnutný pri strojovom učení a spracovaní údajov.
Gradientný zostup môže ľahko vyriešiť problémy v reálnom svete a výrazne prispieť k rastu technológie a rozhodovania založeného na údajoch starostlivým výberom rýchlosti učenia a použitím pokročilých variácií, ako je stochastický gradientový zostup a Adam.




Nechaj odpoveď