Мы сталкиваемся с проблемами оптимизации во многих реальных обстоятельствах, когда нам нужно определить минимум или максимум функции.
Рассмотрим функцию как математическое представление системы, и определение ее минимума или максимума может иметь решающее значение для различных приложений, таких как машинное обучение, проектирование, финансы и другие.
Рассмотрим ландшафт с холмами и долинами, и наша цель — найти самую низкую точку (минимум), чтобы добраться до места назначения как можно быстрее.
Мы часто используем алгоритмы градиентного спуска для решения таких задач оптимизации. Эти алгоритмы представляют собой итерационные методы оптимизации для минимизации функции путем выполнения шагов в направлении наискорейшего спуска (отрицательный градиент).
Градиент отражает направление с самым крутым возрастанием функции, а движение в обратном направлении приводит нас к минимуму.
Что такое алгоритм градиентного спуска?
Градиентный спуск — популярный метод итерационной оптимизации для определения минимума (или максимума) функции.
Это важный инструмент в нескольких областях, в том числе обучение с помощью машины, глубокое обучение, искусственный интеллект, инженерия и финансы.
Основной принцип алгоритма основан на использовании градиента, отображающего направление наибольшего увеличения значения функции.
Алгоритм эффективно перемещает ландшафт функции к минимуму, многократно предпринимая шаги в направлении, противоположном градиенту, итеративно уточняя решение до сходимости.
Почему мы используем алгоритмы градиентного спуска?
Во-первых, их можно использовать для решения широкого круга задач оптимизации, в том числе с многомерными пространствами и сложными функциями.
Во-вторых, они могут быстро находить оптимальные решения, особенно когда аналитическое решение недоступно или требует больших вычислительных ресурсов.
Методы градиентного спуска хорошо масштабируются и могут успешно обрабатывать огромные наборы данных.
В связи с этим они широко используются в алгоритмы машинного обучения например, обучать нейронные сети учиться на данных и изменять их параметры, чтобы свести к минимуму ошибки прогнозирования.
Подробный пример шагов градиентного спуска
Давайте рассмотрим более подробный пример, чтобы лучше понять технику градиентного спуска.
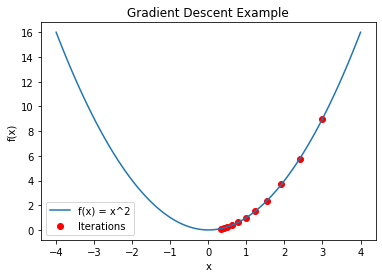
Рассмотрим двумерную функцию f(x) = x2, которая создает базовую параболическую кривую с минимумом в точке (2). Алгоритм градиентного спуска будет использоваться для определения этой минимальной точки.
Шаг 1: Инициализация
Алгоритм градиентного спуска начинается с инициализации значения переменной x, представленной как x0.
Начальное значение может иметь значительное влияние на производительность алгоритма.
Случайная инициализация или использование предварительных знаний о проблеме - два распространенных метода. Предположим, что x₀ = 3 в начале нашего случая.
Шаг 2: Рассчитайте градиент
Градиент функции f(x) в текущем положении x₀. то надо вычислить.
Градиент указывает наклон или скорость изменения функции в этом конкретном положении.
Мы вычисляем производную по x для функции f(x) = x2, что дает f'(x) = 2x. Мы получаем градиент в x0 как 2 * 3 = 6, подставляя x₀ = 3 в вычисление градиента.
Шаг 3: Обновите параметры
Используя информацию о градиенте, мы обновляем значение x следующим образом: x = x₀ – α * f'(x₀), где α (альфа) обозначает скорость обучения.
Скорость обучения — это гиперпараметр, определяющий размер каждого шага в процессе обновления. Установка соответствующей скорости обучения имеет решающее значение, поскольку низкая скорость обучения может привести к алгоритм делать слишком много повторений, чтобы достичь минимума.
С другой стороны, высокая скорость обучения может привести к тому, что алгоритм не сойдется или не сойдется. Предположим, что скорость обучения α = 0.1 для этого примера.
Шаг 4: Итерация
Получив обновленное значение x, мы повторяем шаги 2 и 3 для заданного числа итераций или до тех пор, пока изменение x не станет минимальным, что указывает на сходимость.
Метод вычисляет градиент, обновляет значение x и продолжает процедуру на каждой итерации, позволяя приблизиться к минимуму.
Шаг 5: Конвергенция
Метод сходится после нескольких итераций к точке, где дальнейшие обновления не оказывают существенного влияния на значение функции.
В нашем случае по мере продолжения итераций x будет приближаться к 0, что является минимальным значением f(x) = x^2. Количество итераций, необходимых для сходимости, определяется такими факторами, как выбранная скорость обучения и сложность оптимизируемой функции.
Выбор скорости обучения ()
Выбор приемлемой скорости обучения () имеет решающее значение для эффективности алгоритма градиентного спуска. Как указывалось ранее, низкая скорость обучения может вызвать медленную сходимость, тогда как высокая скорость обучения может вызвать перерегулирование и отказ сходимости.
Поиск надлежащего баланса имеет решающее значение для максимально эффективной сходимости алгоритма к намеченному минимуму.
Настройка скорости обучения на практике часто является процедурой проб и ошибок. Исследователи и практики регулярно экспериментируют с различными скоростями обучения, чтобы увидеть, как они влияют на сходимость алгоритма в их конкретной задаче.
Обработка невыпуклых функций
В то время как в предыдущем примере была простая выпуклая функция, многие реальные проблемы оптимизации связаны с невыпуклыми функциями со многими локальными минимумами.
При использовании градиентного спуска в таких случаях метод может сходиться к локальному минимуму, а не к глобальному минимуму.
Для решения этой проблемы было разработано несколько продвинутых форм градиентного спуска. Стохастический градиентный спуск (SGD) — это один из таких методов, который вводит случайность, выбирая случайное подмножество точек данных (известное как мини-пакет) для вычисления градиента на каждой итерации.
Эта случайная выборка позволяет алгоритму избегать локальных минимумов и исследовать новые участки поверхности функции, повышая шансы обнаружения лучшего минимума.
Adam (Adaptive Moment Estimation) — еще одна заметная вариация, представляющая собой адаптивный подход к оптимизации скорости обучения, который включает в себя преимущества как RMSprop, так и импульса.
Адам динамически изменяет скорость обучения для каждого параметра на основе предыдущей информации о градиенте, что может привести к лучшей сходимости невыпуклых функций.
Эти сложные вариации градиентного спуска доказали свою эффективность при обработке все более сложных функций и стали стандартными инструментами в машинном обучении и глубоком обучении, где распространены проблемы невыпуклой оптимизации.
Шаг 6: Визуализируйте свой прогресс
Давайте посмотрим на прогресс алгоритма градиентного спуска, чтобы лучше понять его итеративный процесс. Рассмотрим график с осью x, представляющей итерации, и осью y, представляющей значение функции f(x).
По мере повторения алгоритма значение x приближается к нулю, и в результате значение функции падает с каждым шагом. При отображении на графике это будет демонстрировать отчетливую тенденцию к снижению, отражающую продвижение алгоритма к достижению минимума.
Шаг 7: тонкая настройка скорости обучения
Скорость обучения () является важным фактором производительности алгоритма. На практике определение идеальной скорости обучения часто требует проб и ошибок.
Некоторые методы оптимизации, такие как графики скорости обучения, могут динамически изменять скорость обучения во время обучения, начиная с более высокого значения и постепенно уменьшая его по мере приближения алгоритма к сходимости.
Этот метод помогает найти баланс между быстрым развитием в начале и стабильностью ближе к концу процесса оптимизации.
Другой пример: минимизация квадратичной функции
Давайте посмотрим на другой пример, чтобы лучше понять градиентный спуск.
Рассмотрим двумерную квадратичную функцию g(x) = (x – 5)^2. При x = 5 эта функция также имеет минимум. Чтобы найти этот минимум, применим градиентный спуск.
1. Инициализация: начнем с x0 = 8 в качестве отправной точки.
2. Рассчитайте градиент g(x): g'(x) = 2(x – 5). Когда мы подставляем x0 = 8, градиент в точке x0 равен 2 * (8 – 5) = 6.
3. При = 0.2 в качестве скорости обучения мы обновляем x следующим образом: x = x₀ – α * g'(x₀) = 8 – 0.2 * 6 = 6.8.
4. Итерация: мы повторяем шаги 2 и 3 столько раз, сколько необходимо, пока не будет достигнута сходимость. Каждый цикл приближает x к 5, минимальному значению g(x) = (x – 5)2.
5. Сходимость. В конечном итоге метод сходится к x = 5, что является минимальным значением g(x) = (x – 5)2.
Сравнение скорости обучения
Давайте сравним скорость сходимости градиентного спуска для разных скоростей обучения, скажем, α = 0.1, α = 0.2 и α = 0.5 в нашем новом примере. Мы видим, что более низкая скорость обучения (например, = 0.1) приведет к более длительной сходимости, но к более точному минимуму.
Более высокая скорость обучения (например, = 0.5) будет сходиться быстрее, но может выходить за пределы или колебаться вокруг минимума, что приводит к снижению точности.
Мультимодальный пример обработки невыпуклых функций
Рассмотрим h(x) = sin(x) + 0.5x, невыпуклую функцию.
У этой функции есть несколько локальных минимумов и максимумов. В зависимости от исходной позиции и скорости обучения мы могли бы сойтись к любому из локальных минимумов, используя стандартный градиентный спуск.
Мы можем решить эту проблему, используя более продвинутые методы оптимизации, такие как Адам или стохастический градиентный спуск (SGD). В этих методах используются адаптивные скорости обучения или случайная выборка для изучения различных областей ландшафта функции, что повышает вероятность достижения лучшего минимума.
Заключение
Алгоритмы градиентного спуска — это мощные инструменты оптимизации, которые широко используются в самых разных отраслях. Они обнаруживают наименьшее (или максимальное) значение функции путем многократного обновления параметров в зависимости от направления градиента.
Из-за итеративного характера алгоритма он может работать с многомерными пространствами и сложными функциями, что делает его незаменимым в машинном обучении и обработке данных.
Градиентный спуск может легко справиться с реальными трудностями и в значительной степени способствовать развитию технологий и принятию решений на основе данных за счет тщательного выбора скорости обучения и применения расширенных вариантов, таких как стохастический градиентный спуск и метод Адама.




Оставьте комментарий