Vi står overfor optimaliseringsproblemer i mange omstendigheter i den virkelige verden der vi må identifisere minimum eller maksimum for en funksjon.
Betrakt en funksjon som en matematisk representasjon av et system, og å bestemme dens minimum eller maksimum kan være avgjørende for en rekke applikasjoner som maskinlæring, engineering, økonomi og andre.
Tenk på et landskap med åser og daler, og vårt mål er å finne det laveste punktet (minimum) for å komme til målet så raskt som mulig.
Vi bruker ofte gradient descent-algoritmer for å løse slike optimaliseringsutfordringer. Disse algoritmene er iterative optimaliseringsmetoder for å minimere en funksjon ved å ta skritt i retning av den bratteste nedstigningen (negativ gradient).
Gradienten reflekterer retningen med den bratteste økningen i funksjonen, og å reise i motsatt retning fører oss til minimum.
Hva er egentlig Gradient Descent Algorithm?
Gradientnedstigning er en populær iterativ optimaliseringstilnærming for å bestemme minimum (eller maksimum) for en funksjon.
Det er et kritisk verktøy på flere felt, bl.a maskinlæring, dyp læring, kunstig intelligens, ingeniørfag og finans.
Algoritmens grunnprinsipp er basert på bruken av gradienten, som viser retningen til den skarpeste økningen i funksjonens verdi.
Algoritmen navigerer effektivt funksjonens landskap mot minimum ved gjentatte ganger å ta skritt i motsatt retning som gradienten, iterativt raffinere løsningen til konvergens.
Hvorfor bruker vi Gradient Descent Algorithms?
For det første kan de brukes til å løse et bredt utvalg av optimaliseringsproblemer, inkludert de med høydimensjonale rom og komplekse funksjoner.
For det andre kan de raskt finne optimale løsninger, spesielt når den analytiske løsningen er utilgjengelig eller beregningsmessig dyr.
Gradient-nedstigningsteknikker er svært skalerbare og kan håndtere enorme datasett.
Som et resultat er de mye brukt i maskinlæringsalgoritmer som å trene nevrale nettverk for å lære av data og endre parametrene deres for å minimere prediksjonsfeil.
Et detaljert eksempel på gradientnedstigningstrinn
La oss se på et mer detaljert eksempel for å få en bedre forståelse av gradientnedstigningsteknikken.
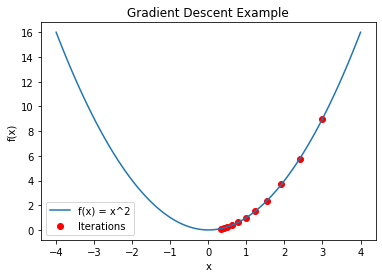
Tenk på 2D-funksjonen f(x) = x2, som genererer en grunnleggende parabolsk kurve med et minimum ved (0,0). Gradientnedstigningsalgoritmen vil bli brukt til å bestemme dette minimale punktet.
Trinn 1: Initialisering
Gradientnedstigningsalgoritmen begynner med å initialisere verdien av variabelen x, representert som x0.
Startverdien kan ha en betydelig innvirkning på algoritmens ytelse.
Tilfeldig initialisering eller bruk av forkunnskaper om problemet er to vanlige teknikker. Anta at x₀ = 3 i starten av vårt tilfelle.
Trinn 2: Beregn gradienten
Gradienten til funksjonen f(x) ved den nåværende posisjonen x₀. må da beregnes.
Gradienten indikerer helningen eller endringshastigheten til funksjonen ved den aktuelle posisjonen.
Vi beregner den deriverte for x for funksjonen f(x) = x2, som gir f'(x) = 2x. Vi får gradienten ved x0 som 2 * 3 = 6 ved å erstatte x₀ = 3 i gradientberegningen.
Trinn 3: Oppdater parametere
Ved å bruke gradientinformasjonen oppdaterer vi verdien av x som følger: x = x₀ – α * f'(x₀), hvor α (alfa) angir læringshastigheten.
Læringshastigheten er en hyperparameter som bestemmer størrelsen på hvert trinn i oppdateringsprosessen. Å angi en passende læringshastighet er avgjørende siden en langsom læringshastighet kan forårsake algoritme å ta for mange repetisjoner for å nå minimum.
En høy læringsrate kan derimot føre til at algoritmen spretter eller ikke klarer å konvergere. La oss anta en læringsrate på α = 0.1 for dette eksemplets skyld.
Trinn 4: Iterer
Etter at vi har den oppdaterte verdien av x, gjentar vi trinn 2 og 3 for et forhåndsbestemt antall iterasjoner eller til endringen i x blir minimal, noe som indikerer konvergens.
Metoden beregner gradienten, oppdaterer verdien av x, og fortsetter prosedyren ved hver iterasjon, slik at den kan komme nærmere minimum.
Trinn 5: Konvergens
Teknikken konvergerer etter noen iterasjoner til et punkt der ytterligere oppdateringer ikke påvirker funksjonens verdi vesentlig.
I vårt tilfelle, når iterasjonene fortsetter, vil x nærme seg 0, som er minimumsverdien av f(x) = x^2. Antall iterasjoner som er nødvendige for konvergens bestemmes av faktorer som valgt læringshastighet og kompleksiteten til funksjonen som optimaliseres.
Velge en læringsrate ()
Å velge en akseptabel læringsrate () er avgjørende for effektiviteten til gradientnedstigningsalgoritmen. Som tidligere nevnt kan en lav læringsrate indusere langsom konvergens, mens en høy læringsrate kan føre til overskridelse og manglende konvergens.
Å finne den riktige balansen er avgjørende for å sikre at algoritmen konvergerer til det tiltenkte minimum så effektivt som mulig.
Å justere læringshastigheten er ofte en prøving-og-feil-prosedyre i praksis. Forskere og praktikere eksperimenterer rutinemessig med forskjellige læringshastigheter for å se hvordan de påvirker algoritmens konvergens på deres spesielle utfordring.
Håndtering av ikke-konvekse funksjoner
Mens det foregående eksempelet hadde en enkel konveks funksjon, involverer mange optimeringsproblemer i den virkelige verden ikke-konvekse funksjoner med mange lokale minima.
Ved bruk av gradientnedstigning i slike tilfeller kan metoden konvergere til et lokalt minimum i stedet for det globale minimum.
Flere avanserte former for gradientnedstigning er utviklet for å overvinne dette problemet. Stokastisk gradientnedstigning (SGD) er en slik metode som introduserer tilfeldighet ved å velge et tilfeldig delsett av datapunkter (kjent som en minibatch) for å beregne gradienten ved hver iterasjon.
Denne tilfeldige prøvetakingen lar algoritmen unngå lokale minima og utforske nye deler av funksjonens terreng, noe som øker sjansene for å oppdage et bedre minimum.
Adam (Adaptive Moment Estimation) er en annen fremtredende variant, som er en adaptiv læringshastighetsoptimaliseringstilnærming som inkluderer fordelene med både RMSprop og momentum.
Adam modifiserer læringshastigheten for hver parameter dynamisk basert på tidligere gradientinformasjon, noe som kan resultere i bedre konvergens på ikke-konvekse funksjoner.
Disse sofistikerte gradientnedstigningsvariasjonene har vist seg å være effektive for å håndtere stadig mer komplekse funksjoner og har blitt standardverktøy innen maskinlæring og dyp læring, der ikke-konvekse optimaliseringsproblemer er vanlige.
Trinn 6: Visualiser fremgangen din
La oss se fremdriften til gradientnedstigningsalgoritmen for å få en bedre forståelse av dens iterative prosess. Tenk på en graf med en x-akse som representerer iterasjoner og en y-akse som representerer verdien av funksjonen f(x).
Når algoritmen itererer, nærmer verdien av x null, og som et resultat synker funksjonsverdien for hvert trinn. Når det plottes på en graf, vil dette vise en tydelig synkende trend, noe som gjenspeiler algoritmens fremgang mot å nå minimum.
Trinn 7: Finjuster læringshastigheten
Læringsraten () er en viktig faktor i algoritmens ytelse. I praksis krever det ofte prøving og feiling å bestemme den ideelle læringsraten.
Noen optimaliseringsteknikker, for eksempel tidsplaner for læringshastighet, kan endre læringshastigheten dynamisk under trening, og starter med en høyere verdi og gradvis reduseres etter hvert som algoritmen nærmer seg konvergens.
Denne metoden bidrar til å finne en balanse mellom rask utvikling i begynnelsen og stabilitet mot slutten av optimaliseringsprosessen.
Et annet eksempel: Minimering av en kvadratisk funksjon
La oss se på et annet eksempel for å få en bedre forståelse av gradientnedstigning.
Tenk på den todimensjonale kvadratiske funksjonen g(x) = (x – 5)^2. Ved x = 5 har denne funksjonen også et minimum. For å finne dette minimumet skal vi bruke gradientnedstigning.
1. Initialisering: La oss begynne med x0 = 8 som utgangspunkt.
2. Regn ut gradienten til g(x): g'(x) = 2(x – 5). Når vi erstatter x0 = 8, er gradienten ved x0 2 * (8 – 5) = 6.
3. Med = 0.2 som læringsrate oppdaterer vi x som følger: x = x₀ – α * g'(x₀) = 8 – 0.2 * 6 = 6.8.
4. Iterer: Vi gjentar trinn 2 og 3 så mange ganger som nødvendig til konvergens er nådd. Hver syklus bringer x nærmere 5, den minimale verdien av g(x) = (x – 5)2.
5. Konvergens: Metoden vil til slutt konvergere til x = 5, som er minimumsverdien av g(x) = (x – 5)2.
Sammenligning av læringsrater
La oss sammenligne konvergenshastigheten for gradientnedstigning for forskjellige læringshastigheter, si α = 0.1, α = 0.2 og α = 0.5 i vårt nye eksempel. Vi kan se at en lavere læringsrate (f.eks. = 0.1) vil resultere i en lengre konvergens, men et mer nøyaktig minimum.
En høyere læringsrate (f.eks. = 0.5) vil konvergere raskere, men kan overskride eller svinge rundt minimum, noe som resulterer i dårligere nøyaktighet.
Et multimodalt eksempel på ikke-konveks funksjonshåndtering
Tenk på h(x) = sin(x) + 0.5x, en ikke-konveks funksjon.
Det er flere lokale minima og maksima for denne funksjonen. Avhengig av startposisjon og læringshastighet, kan vi konvergere til alle de lokale minimaene ved å bruke standard gradientnedstigning.
Vi kan løse dette ved å bruke mer avanserte optimaliseringsteknikker som Adam eller stokastisk gradientnedstigning (SGD). Disse metodene bruker adaptive læringshastigheter eller tilfeldig prøvetaking for å utforske ulike regioner i funksjonens landskap, noe som øker sannsynligheten for å oppnå et bedre minimum.
konklusjonen
Gradient descent-algoritmer er kraftige optimaliseringsverktøy som er mye brukt i et bredt spekter av bransjer. De oppdager den laveste (eller maksimum) av en funksjon ved å iterativt oppdatere parametere basert på retningen til gradienten.
På grunn av algoritmens iterative natur, kan den håndtere høydimensjonale rom og komplekse funksjoner, noe som gjør den uunnværlig i maskinlæring og databehandling.
Gradientnedstigning kan enkelt takle virkelige vanskeligheter og i stor grad bidra til veksten av teknologi og datadrevet beslutningstaking ved å velge læringshastigheten nøye og bruke avanserte variasjoner som stokastisk gradientnedstigning og Adam.




Legg igjen en kommentar