We worden geconfronteerd met optimalisatieproblemen in veel praktijksituaties waarin we het minimum of maximum van een functie moeten identificeren.
Beschouw een functie als een wiskundige weergave van een systeem, en het bepalen van het minimum of maximum kan van cruciaal belang zijn voor een verscheidenheid aan toepassingen, zoals machine learning, engineering, financiën en andere.
Stel je een landschap voor met heuvels en dalen, en ons doel is om het laagste punt (minimum) te vinden om zo snel mogelijk op onze bestemming te komen.
We gebruiken vaak gradiënt-afdalingsalgoritmen om dergelijke optimalisatie-uitdagingen op te lossen. Deze algoritmen zijn iteratieve optimalisatiemethoden voor het minimaliseren van een functie door stappen te nemen in de richting van de steilste afdaling (negatieve gradiënt).
De gradiënt weerspiegelt de richting met de sterkste toename van de functie, en reizen in de tegenovergestelde richting leidt ons naar het minimum.
Wat is het Gradient Descent-algoritme precies?
Gradiëntafdaling is een populaire iteratieve optimalisatiebenadering voor het bepalen van het minimum (of maximum) van een functie.
Het is een cruciaal hulpmiddel op verschillende gebieden, waaronder machine learning, deep learning, kunstmatige intelligentie, techniek en financiën.
Het basisprincipe van het algoritme is gebaseerd op het gebruik van de gradiënt, die de richting van de scherpste toename van de waarde van de functie weergeeft.
Het algoritme navigeert efficiënt door het landschap van de functie naar het minimum door herhaaldelijk stappen te nemen in de tegenovergestelde richting van de gradiënt, waarbij de oplossing iteratief wordt verfijnd tot convergentie.
Waarom gebruiken we algoritmen voor gradiëntafdaling?
Om te beginnen kunnen ze worden gebruikt om een breed scala aan optimalisatieproblemen op te lossen, waaronder die met hoogdimensionale ruimtes en complexe functies.
Ten tweede kunnen ze snel optimale oplossingen vinden, vooral wanneer de analytische oplossing niet beschikbaar of rekenkundig duur is.
Gradient-afdalingstechnieken zijn zeer schaalbaar en kunnen met succes enorme datasets aan.
Als gevolg hiervan worden ze veel gebruikt in algoritmen voor machine learning zoals het trainen van neurale netwerken om te leren van gegevens en hun parameters aan te passen om voorspellingsfouten te minimaliseren.
Een gedetailleerd voorbeeld van hellingsafdalingen
Laten we een meer gedetailleerd voorbeeld bekijken om een beter begrip te krijgen van de gradiëntafdalingstechniek.
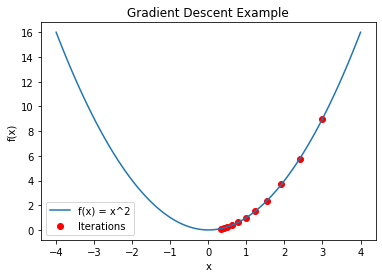
Beschouw de 2D-functie f(x) = x2, die een parabolische basiscurve genereert met een minimum op (0,0). Het gradiënt-afdalingsalgoritme zal worden gebruikt om dit minimale punt te bepalen.
Stap 1: Initialisatie
Het algoritme voor gradiëntafdaling begint met het initialiseren van de waarde van de variabele x, weergegeven als x0.
De initiële waarde kan een aanzienlijke invloed hebben op de prestaties van het algoritme.
Willekeurige initialisatie of het gebruik van voorkennis van het probleem zijn twee veelgebruikte technieken. Neem aan dat x₀ = 3 aan het begin van onze zaak.
Stap 2: Bereken het verloop
De gradiënt van de functie f(x) op de huidige positie x₀. moet dan berekend worden.
De gradiënt geeft de helling of veranderingssnelheid van de functie op die specifieke positie aan.
We berekenen de afgeleide van x voor de functie f(x) = x2, die f'(x) = 2x oplevert. We krijgen de gradiënt op x0 als 2 * 3 = 6 door x₀ = 3 in te vullen in de gradiëntberekening.
Stap 3: parameters bijwerken
Met behulp van de gradiëntinformatie werken we de waarde van x als volgt bij: x = x₀ – α * f'(x₀), waarbij α (alpha) de leersnelheid aangeeft.
De leersnelheid is een hyperparameter die de grootte van elke stap in het updateproces bepaalt. Het instellen van een geschikt leertempo is van cruciaal belang, aangezien een laag leertempo de oorzaak kan zijn algoritme te veel herhalingen nemen om het minimum te bereiken.
Een hoge leersnelheid kan er daarentegen toe leiden dat het algoritme stuitert of niet convergeert. Laten we voor dit voorbeeld uitgaan van een leersnelheid van α = 0.1.
Stap 4: herhalen
Nadat we de bijgewerkte waarde van x hebben, herhalen we stappen 2 en 3 voor een vooraf bepaald aantal iteraties of totdat de verandering in x minimaal wordt, wat duidt op convergentie.
De methode berekent de gradiënt, werkt de waarde van x bij en vervolgt de procedure bij elke iteratie, waardoor deze dichter bij het minimum komt.
Stap 5: convergentie
De techniek convergeert na een paar iteraties tot een punt waarop verdere updates geen wezenlijke invloed hebben op de waarde van de functie.
In ons geval, terwijl de iteraties doorgaan, zal x 0 naderen, wat de minimumwaarde is van f(x) = x^2. Het aantal iteraties dat nodig is voor convergentie wordt bepaald door factoren zoals de geselecteerde leersnelheid en de complexiteit van de functie die wordt geoptimaliseerd.
Een leertempo kiezen ()
Het kiezen van een acceptabel leertempo () is van cruciaal belang voor de effectiviteit van het algoritme voor gradiëntafdaling. Zoals eerder vermeld, kan een laag leertempo langzame convergentie veroorzaken, terwijl een hoog leertempo kan leiden tot doorschieten en falen van convergentie.
Het vinden van de juiste balans is van cruciaal belang om ervoor te zorgen dat het algoritme zo efficiënt mogelijk convergeert naar het beoogde minimum.
Het afstemmen van het leertempo is in de praktijk vaak een proces van vallen en opstaan. Onderzoekers en praktijkmensen experimenteren routinematig met verschillende leersnelheden om te zien hoe deze de convergentie van het algoritme voor hun specifieke uitdaging beïnvloeden.
Omgaan met niet-convexe functies
Hoewel het voorgaande voorbeeld een eenvoudige convexe functie had, hebben veel real-world optimalisatieproblemen betrekking op niet-convexe functies met veel lokale minima.
Wanneer in dergelijke gevallen gradiëntafdaling wordt gebruikt, kan de methode convergeren naar een lokaal minimum in plaats van naar het globale minimum.
Er zijn verschillende geavanceerde vormen van gradiëntafdaling ontwikkeld om dit probleem op te lossen. Stochastic Gradient Descent (SGD) is zo'n methode die willekeur introduceert door een willekeurige subset van datapunten te kiezen (bekend als een mini-batch) om de gradiënt bij elke iteratie te berekenen.
Door deze willekeurige bemonstering kan het algoritme lokale minima vermijden en nieuwe delen van het terrein van de functie verkennen, waardoor de kans op het ontdekken van een beter minimum wordt vergroot.
Adam (Adaptive Moment Estimation) is een andere prominente variant, een adaptieve optimalisatiebenadering voor leersnelheid die de voordelen van zowel RMSprop als momentum omvat.
Adam past de leersnelheid voor elke parameter dynamisch aan op basis van eerdere gradiëntinformatie, wat kan resulteren in een betere convergentie van niet-convexe functies.
Deze geavanceerde gradiënt-afdalingsvariaties zijn effectief gebleken bij het omgaan met steeds complexere functies en zijn standaardtools geworden in machine learning en deep learning, waar niet-convexe optimalisatieproblemen veel voorkomen.
Stap 6: visualiseer uw voortgang
Laten we eens kijken naar de voortgang van het algoritme voor gradiëntafdaling om een beter begrip te krijgen van het iteratieve proces. Beschouw een grafiek met een x-as die iteraties weergeeft en een y-as die de waarde van de functie f(x) voorstelt.
Terwijl het algoritme itereert, nadert de waarde van x nul en als resultaat daalt de functiewaarde bij elke stap. Wanneer dit in een grafiek wordt uitgezet, zou dit een duidelijk dalende trend vertonen, die de voortgang van het algoritme naar het bereiken van het minimum weergeeft.
Stap 7: het leertempo verfijnen
De leersnelheid () is een belangrijke factor in de prestaties van het algoritme. In de praktijk is het bepalen van het ideale leertempo vaak een kwestie van vallen en opstaan.
Sommige optimalisatietechnieken, zoals leersnelheidsschema's, kunnen de leersnelheid tijdens de training dynamisch wijzigen, beginnend met een hogere waarde en geleidelijk afnemend naarmate het algoritme convergentie nadert.
Deze methode helpt een balans te vinden tussen snelle ontwikkeling in het begin en stabiliteit aan het einde van het optimalisatieproces.
Nog een voorbeeld: een kwadratische functie minimaliseren
Laten we naar een ander voorbeeld kijken om een beter begrip te krijgen van gradiëntafdaling.
Beschouw de tweedimensionale kwadratische functie g(x) = (x – 5)^2. Ook deze functie heeft bij x = 5 een minimum. Om dit minimum te vinden, passen we gradiëntafdaling toe.
1. Initialisatie: Laten we beginnen met x0 = 8 als uitgangspunt.
2. Bereken de gradiënt van g(x): g'(x) = 2(x – 5). Als we x0 = 8 vervangen, is de gradiënt bij x0 2 * (8 – 5) = 6.
3. Met = 0.2 als onze leersnelheid werken we x als volgt bij: x = x₀ – α * g'(x₀) = 8 – 0.2 * 6 = 6.8.
4. Itereren: we herhalen stappen 2 en 3 zo vaak als nodig is totdat convergentie is bereikt. Elke cyclus brengt x dichter bij 5, de minimale waarde van g(x) = (x – 5)2.
5. Convergentie: de methode zal uiteindelijk convergeren naar x = 5, wat de minimale waarde is van g(x) = (x – 5)2.
Vergelijking van leertarieven
Laten we de convergentiesnelheid van gradiëntafdaling vergelijken voor verschillende leersnelheden, zeg α = 0.1, α = 0.2 en α = 0.5 in ons nieuwe voorbeeld. We kunnen zien dat een lagere leersnelheid (bijv. = 0.1) zal resulteren in een langere convergentie maar een nauwkeuriger minimum.
Een hoger leertempo (bijv. = 0.5) zal sneller convergeren, maar kan het minimum overschrijden of oscilleren, wat resulteert in een slechtere nauwkeurigheid.
Een multimodaal voorbeeld van niet-convexe functieafhandeling
Beschouw h(x) = sin(x) + 0.5x, een niet-convexe functie.
Er zijn verschillende lokale minima en maxima voor deze functie. Afhankelijk van de startpositie en leersnelheid, kunnen we convergeren naar elk van de lokale minima met behulp van standaard gradiëntafdaling.
We kunnen dit oplossen door gebruik te maken van meer geavanceerde optimalisatietechnieken zoals Adam of stochastische gradiëntafdaling (SGD). Deze methoden gebruiken adaptieve leersnelheden of willekeurige steekproeven om verschillende regio's van het functielandschap te verkennen, waardoor de kans groter wordt dat een beter minimum wordt bereikt.
Conclusie
Gradiënt-afdalingsalgoritmen zijn krachtige optimalisatietools die veel worden gebruikt in een breed scala van industrieën. Ze ontdekken het laagste (of maximum) van een functie door parameters iteratief bij te werken op basis van de richting van de gradiënt.
Vanwege de iteratieve aard van het algoritme kan het hoog-dimensionale ruimtes en complexe functies aan, waardoor het onmisbaar is bij machine learning en gegevensverwerking.
Gradiëntafdaling kan gemakkelijk problemen uit de echte wereld aanpakken en in grote mate bijdragen aan de groei van technologie en datagestuurde besluitvorming door zorgvuldig het leertempo te selecteren en geavanceerde variaties toe te passen, zoals stochastische gradiëntafdaling en Adam.




Laat een reactie achter