Nous sommes confrontés à des problèmes d'optimisation dans de nombreuses circonstances réelles où nous devons identifier le minimum ou le maximum d'une fonction.
Considérez une fonction comme une représentation mathématique d'un système, et la détermination de son minimum ou de son maximum peut être critique pour une variété d'applications telles que l'apprentissage automatique, l'ingénierie, la finance et autres.
Considérez un paysage avec des collines et des vallées, et notre objectif est de trouver le point le plus bas (minimum) pour arriver à destination le plus rapidement possible.
Nous utilisons fréquemment des algorithmes de descente de gradient pour résoudre de tels défis d'optimisation. Ces algorithmes sont des méthodes d'optimisation itératives permettant de minimiser une fonction en faisant des pas dans le sens de la descente la plus raide (gradient négatif).
Le gradient reflète la direction avec la plus forte augmentation de la fonction, et voyager dans la direction opposée nous conduit au minimum.
Qu'est-ce que l'algorithme de descente de gradient ?
La descente de gradient est une approche d'optimisation itérative populaire pour déterminer le minimum (ou le maximum) d'une fonction.
C'est un outil essentiel dans plusieurs domaines, y compris machine learning, apprentissage profond, intelligence artificielle, ingénierie et finance.
Le principe de base de l'algorithme repose sur son utilisation du gradient, qui affiche la direction de la plus forte augmentation de la valeur de la fonction.
L'algorithme navigue efficacement dans le paysage de la fonction vers le minimum en prenant à plusieurs reprises des étapes dans la direction opposée au gradient, affinant de manière itérative la solution jusqu'à convergence.
Pourquoi utilisons-nous des algorithmes de descente de gradient ?
Pour commencer, ils peuvent être utilisés pour résoudre une grande variété de problèmes d'optimisation, y compris ceux avec des espaces de grande dimension et des fonctions complexes.
Deuxièmement, ils peuvent trouver rapidement des solutions optimales, en particulier lorsque la solution analytique est indisponible ou coûteuse en calculs.
Les techniques de descente de gradient sont hautement évolutives et peuvent gérer avec succès d'énormes ensembles de données.
En conséquence, ils sont largement utilisés dans algorithmes d'apprentissage automatique comme la formation de réseaux de neurones pour apprendre des données et modifier leurs paramètres afin de minimiser les erreurs de prédiction.
Un exemple détaillé d'étapes de descente de gradient
Regardons un exemple plus détaillé pour mieux comprendre la technique de descente de gradient.
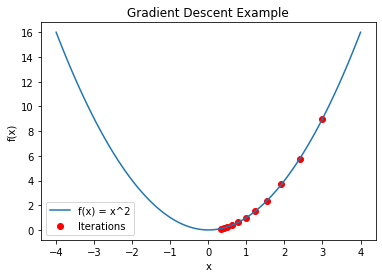
Considérons la fonction 2D f(x) = x2, qui génère une courbe parabolique de base avec un minimum à (0,0). L'algorithme de descente de gradient sera utilisé pour déterminer ce point minimal.
Étape 1 : Initialisation
L'algorithme de descente de gradient commence par initialiser la valeur de la variable x, représentée par x0.
La valeur initiale peut avoir un impact considérable sur les performances de l'algorithme.
L'initialisation aléatoire ou l'utilisation d'une connaissance préalable du problème sont deux techniques courantes. Supposons que x₀ = 3 au début de notre cas.
Étape 2 : Calculer le dégradé
Le gradient de la fonction f(x) à la position actuelle x₀. doit alors être calculé.
Le gradient indique la pente ou le taux de variation de la fonction à cette position particulière.
On calcule la dérivée concernant x pour la fonction f(x) = x2, ce qui donne f'(x) = 2x. Nous obtenons le gradient à x0 sous la forme 2 * 3 = 6 en remplaçant x₀ = 3 dans le calcul du gradient.
Étape 3 : Mettre à jour les paramètres
En utilisant les informations de gradient, nous mettons à jour la valeur de x comme suit : x = x₀ – α * f'(x₀), où α (alpha) désigne le taux d'apprentissage.
Le taux d'apprentissage est un hyperparamètre qui détermine la taille de chaque étape du processus de mise à jour. Il est crucial de définir un taux d'apprentissage approprié, car un taux d'apprentissage lent peut algorithme faire trop de répétitions pour atteindre le minimum.
Un taux d'apprentissage élevé, en revanche, peut entraîner le rebond ou l'échec de la convergence de l'algorithme. Supposons un taux d'apprentissage de α = 0.1 pour les besoins de cet exemple.
Étape 4 : Itérer
Une fois que nous avons la valeur mise à jour de x, nous répétons les étapes 2 et 3 pour un nombre prédéterminé d'itérations ou jusqu'à ce que le changement de x devienne minimal, indiquant la convergence.
La méthode calcule le gradient, met à jour la valeur de x, et continue la procédure à chaque itération, lui permettant de se rapprocher du minimum.
Étape 5 : Convergence
La technique converge après quelques itérations jusqu'à un point où d'autres mises à jour n'ont pas d'impact matériel sur la valeur de la fonction.
Dans notre cas, au fur et à mesure des itérations, x approchera de 0, qui est la valeur minimale de f(x) = x^2. Le nombre d'itérations nécessaires à la convergence est déterminé par des facteurs tels que le taux d'apprentissage sélectionné et la complexité de la fonction à optimiser.
Choisir un taux d'apprentissage ()
Le choix d'un taux d'apprentissage acceptable () est essentiel pour l'efficacité de l'algorithme de descente de gradient. Comme indiqué précédemment, un faible taux d'apprentissage peut induire une convergence lente, tandis qu'un taux d'apprentissage élevé peut provoquer un dépassement et une incapacité à converger.
Trouver le bon équilibre est essentiel pour garantir que l'algorithme converge vers le minimum prévu aussi efficacement que possible.
Le réglage du taux d'apprentissage est souvent une procédure d'essais et d'erreurs dans la pratique. Les chercheurs et les praticiens expérimentent régulièrement différents taux d'apprentissage pour voir comment ils affectent la convergence de l'algorithme sur leur défi particulier.
Gestion des fonctions non convexes
Alors que l'exemple précédent avait une fonction convexe simple, de nombreux problèmes d'optimisation réels impliquent des fonctions non convexes avec de nombreux minima locaux.
Lors de l'utilisation de la descente de gradient dans de tels cas, la méthode peut converger vers un minimum local plutôt que vers le minimum global.
Plusieurs formes avancées de descente de gradient ont été développées pour surmonter ce problème. La descente de gradient stochastique (SGD) est l'une de ces méthodes qui introduit un caractère aléatoire en choisissant un sous-ensemble aléatoire de points de données (appelé mini-lot) pour calculer le gradient à chaque itération.
Cet échantillonnage aléatoire permet à l'algorithme d'éviter les minima locaux et d'explorer de nouvelles portions du terrain de la fonction, augmentant ainsi les chances de découvrir un meilleur minimum.
Adam (Adaptive Moment Estimation) est une autre variante importante, qui est une approche d'optimisation adaptative du taux d'apprentissage qui intègre les avantages à la fois de RMSprop et de momentum.
Adam modifie dynamiquement le taux d'apprentissage pour chaque paramètre en fonction des informations de gradient précédentes, ce qui pourrait entraîner une meilleure convergence sur les fonctions non convexes.
Ces variations sophistiquées de descente de gradient se sont avérées efficaces pour gérer des fonctions de plus en plus complexes et sont devenues des outils standard dans l'apprentissage automatique et l'apprentissage en profondeur, où les problèmes d'optimisation non convexe sont courants.
Étape 6 : Visualisez vos progrès
Voyons la progression de l'algorithme de descente de gradient pour mieux comprendre son processus itératif. Considérons un graphique avec un axe des x représentant les itérations et un axe des y représentant la valeur de la fonction f(x).
Au fur et à mesure que l'algorithme itère, la valeur de x approche de zéro et, par conséquent, la valeur de la fonction diminue à chaque étape. Lorsqu'il est tracé sur un graphique, cela présenterait une tendance à la baisse distincte, reflétant la progression de l'algorithme vers l'atteinte du minimum.
Étape 7 : Réglage fin du taux d'apprentissage
Le taux d'apprentissage () est un facteur important dans les performances de l'algorithme. En pratique, la détermination du taux d'apprentissage idéal nécessite souvent des essais et des erreurs.
Certaines techniques d'optimisation, telles que les programmes de taux d'apprentissage, peuvent modifier le taux d'apprentissage de manière dynamique pendant la formation, en commençant par une valeur plus élevée et en la diminuant progressivement à mesure que l'algorithme approche de la convergence.
Cette méthode aide à trouver un équilibre entre un développement rapide au début et une stabilité vers la fin du processus d'optimisation.
Autre exemple : Minimiser une fonction quadratique
Regardons un autre exemple pour mieux comprendre la descente de gradient.
Considérons la fonction quadratique bidimensionnelle g(x) = (x – 5)^2. A x = 5, cette fonction a également un minimum. Pour trouver ce minimum, nous allons appliquer une descente de gradient.
1. Initialisation : Commençons par x0 = 8 comme point de départ.
2. Calculez le gradient de g(x) : g'(x) = 2(x – 5). Lorsque nous substituons x0 = 8, le gradient à x0 est 2 * (8 – 5) = 6.
3. Avec = 0.2 comme taux d'apprentissage, nous mettons à jour x comme suit : x = x₀ – α * g'(x₀) = 8 – 0.2 * 6 = 6.8.
4. Itérer : Nous répétons les étapes 2 et 3 autant de fois que nécessaire jusqu'à ce que la convergence soit atteinte. Chaque cycle rapproche x de 5, la valeur minimale de g(x) = (x – 5)2.
5. Convergence : La méthode finira par converger vers x = 5, qui est la valeur minimale de g(x) = (x – 5)2.
Comparaison des taux d'apprentissage
Comparons la vitesse de convergence de la descente de gradient pour différents taux d'apprentissage, disons α = 0.1, α = 0.2 et α = 0.5 dans notre nouvel exemple. Nous pouvons voir qu'un taux d'apprentissage plus faible (par exemple, = 0.1) se traduira par une convergence plus longue mais un minimum plus précis.
Un taux d'apprentissage plus élevé (par exemple, = 0.5) convergera plus rapidement mais peut dépasser ou osciller autour du minimum, ce qui entraîne une moins bonne précision.
Un exemple multimodal de gestion de fonctions non convexes
Considérons h(x) = sin(x) + 0.5x, une fonction non convexe.
Il existe plusieurs minima et maxima locaux pour cette fonction. En fonction de la position de départ et du taux d'apprentissage, nous pourrions converger vers l'un des minima locaux en utilisant une descente de gradient standard.
Nous pouvons résoudre ce problème en utilisant des techniques d'optimisation plus avancées comme Adam ou la descente de gradient stochastique (SGD). Ces méthodes utilisent des taux d'apprentissage adaptatifs ou un échantillonnage aléatoire pour explorer différentes régions du paysage de la fonction, augmentant ainsi la probabilité d'atteindre un meilleur minimum.
Conclusion
Les algorithmes de descente de gradient sont de puissants outils d'optimisation largement utilisés dans un large éventail d'industries. Ils découvrent le plus bas (ou le maximum) d'une fonction en mettant à jour itérativement les paramètres en fonction de la direction du gradient.
En raison de la nature itérative de l'algorithme, il peut gérer des espaces de grande dimension et des fonctions complexes, ce qui le rend indispensable dans l'apprentissage automatique et le traitement des données.
La descente de gradient peut facilement résoudre les difficultés du monde réel et contribuer grandement à la croissance de la technologie et de la prise de décision basée sur les données en sélectionnant soigneusement le taux d'apprentissage et en appliquant des variations avancées telles que la descente de gradient stochastique et Adam.




Soyez sympa! Laissez un commentaire