Me seisame silmitsi optimeerimisprobleemidega paljudes reaalsetes olukordades, kus peame tuvastama funktsiooni miinimumi või maksimumi.
Pidage funktsiooni süsteemi matemaatiliseks esituseks ja selle miinimumi või maksimumi määramine võib olla kriitilise tähtsusega mitmesuguste rakenduste jaoks, nagu masinõpe, inseneritöö, rahandus ja muud.
Mõelge mägede ja orgudega maastikule ning meie eesmärk on leida madalaim punkt (minimaalne), et jõuda sihtkohta nii kiiresti kui võimalik.
Selliste optimeerimisprobleemide lahendamiseks kasutame sageli gradiendi laskumise algoritme. Need algoritmid on iteratiivsed optimeerimismeetodid funktsiooni minimeerimiseks, astudes samme kõige järsema laskumise suunas (negatiivne gradient).
Gradient peegeldab funktsiooni kõige järsema kasvuga suunda ja vastupidises suunas sõitmine viib meid miinimumini.
Mis täpselt on gradiendi laskumise algoritm?
Gradiendi laskumine on populaarne iteratiivne optimeerimisviis funktsiooni miinimumi (või maksimumi) määramiseks.
See on oluline tööriist mitmes valdkonnas, sealhulgas masinõpe, süvaõpe, tehisintellekt, inseneriteadus ja rahandus.
Algoritmi põhiprintsiip põhineb gradiendi kasutamisel, mis näitab funktsiooni väärtuse järseima kasvu suunda.
Algoritm navigeerib funktsiooni maastikul tõhusalt miinimumi poole, astudes korduvalt samme gradiendile vastupidises suunas, täpsustades lahendust iteratiivselt kuni lähenemiseni.
Miks me kasutame gradiendi laskumise algoritme?
Alustuseks saab neid kasutada mitmesuguste optimeerimisprobleemide lahendamiseks, sealhulgas suuremõõtmeliste ruumide ja keerukate funktsioonidega seotud probleemide lahendamiseks.
Teiseks suudavad nad kiiresti leida optimaalseid lahendusi, eriti kui analüütiline lahendus pole saadaval või on arvutuslikult kallis.
Gradiendi laskumise tehnikad on väga skaleeritavad ja suudavad edukalt toime tulla tohutute andmekogumitega.
Selle tulemusena kasutatakse neid laialdaselt masinõppe algoritmid nagu närvivõrkude koolitamine andmetest õppimiseks ja nende parameetrite muutmiseks, et ennustusvigu minimeerida.
Üksikasjalik näide gradiendi laskumise sammudest
Gradiendi laskumise tehnika paremaks mõistmiseks vaatame üksikasjalikumat näidet.
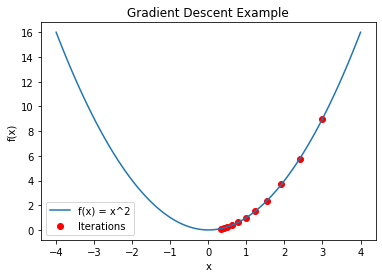
Vaatleme 2D-funktsiooni f(x) = x2, mis genereerib paraboolse põhikõvera miinimumiga (0,0). Selle minimaalse punkti määramiseks kasutatakse gradiendi laskumise algoritmi.
1. samm: lähtestamine
Gradiendi laskumisalgoritm algab muutuja x väärtuse lähtestamisega, mis on esitatud kui x0.
Algväärtusel võib olla oluline mõju algoritmi toimimisele.
Juhuslik initsialiseerimine või probleemi eelteadmiste kasutamine on kaks levinumat tehnikat. Oletame, et meie juhtumi alguses on x₀ = 3.
2. samm: arvutage gradient
Funktsiooni f(x) gradient praeguses asukohas x₀. tuleb siis arvutada.
Gradient näitab funktsiooni kallet või muutumise kiirust selles konkreetses kohas.
Arvutame funktsiooni f(x) = x2 tuletise x kohta, mis annab f'(x) = 2x. Gradiendi x0 juures saame 2 * 3 = 6, asendades gradiendi arvutamisel väärtusega x₀ = 3.
3. samm: värskendage parameetreid
Kasutades gradiendi teavet, värskendame x väärtust järgmiselt: x = x₀ – α * f'(x₀), kus α (alfa) tähistab õppimiskiirust.
Õppimiskiirus on hüperparameeter, mis määrab iga värskendamisprotsessi etapi suuruse. Sobiva õppimiskiiruse määramine on ülioluline, kuna aeglane õppimiskiirus võib põhjustada algoritm teha liiga palju kordusi, et miinimumini jõuda.
Kõrge õppimise määr seevastu võib põhjustada algoritmi põrkumise või lähenemise ebaõnnestumise. Oletame selle näite huvides õppimiskiiruseks α = 0.1.
4. samm: korrake
Pärast x-i värskendatud väärtuse saamist kordame samme 2 ja 3 etteantud arvu iteratsioonide jaoks või seni, kuni x-i muutus muutub minimaalseks, mis näitab lähenemist.
Meetod arvutab gradiendi, värskendab x väärtust ja jätkab protseduuri igal iteratsioonil, võimaldades sellel läheneda miinimumile.
5. samm: lähenemine
Tehnika läheneb mõne iteratsiooni järel punktini, kus edasised värskendused funktsiooni väärtust oluliselt ei mõjuta.
Meie puhul läheneb x iteratsioonide jätkudes 0-le, mis on f(x) = x^2 minimaalne väärtus. Konvergentsi jaoks vajalike iteratsioonide arvu määravad sellised tegurid nagu valitud õppimiskiirus ja optimeeritava funktsiooni keerukus.
Õppimismäära valimine ()
Vastuvõetava õppimiskiiruse () valimine on gradiendi laskumisalgoritmi tõhususe jaoks kriitiline. Nagu eelnevalt öeldud, võib madal õppimismäär kutsuda esile aeglase lähenemise, samas kui kõrge õppimiskiirus võib põhjustada ülevõtmist ja konvergentsi ebaõnnestumist.
Õige tasakaalu leidmine on ülioluline, et tagada algoritmi võimalikult tõhus lähenemine kavandatud miinimumile.
Õppimiskiiruse häälestamine on praktikas sageli katse-eksituse meetod. Teadlased ja praktikud katsetavad regulaarselt erinevate õppimismääradega, et näha, kuidas need mõjutavad algoritmi lähenemist nende konkreetsele väljakutsele.
Mittekumerate funktsioonide käsitlemine
Kui eelmisel näitel oli lihtne kumer funktsioon, siis paljud tegelikud optimeerimisprobleemid hõlmavad mittekumeraid funktsioone paljude kohalike miinimumidega.
Kui sellistel juhtudel kasutatakse gradiendi laskumist, võib meetod läheneda pigem kohalikule miinimumile kui globaalsele miinimumile.
Selle probleemi lahendamiseks on välja töötatud mitu arenenud gradiendi laskumise vormi. Stochastic Gradient Descent (SGD) on üks selline meetod, mis toob sisse juhuslikkuse, valides iga iteratsiooni gradiendi arvutamiseks juhusliku andmepunktide alamhulga (tuntud kui minipartii).
See juhuslik valim võimaldab algoritmil vältida kohalikke miinimume ja uurida funktsiooni maastiku uusi osi, suurendades võimalusi parema miinimumi leidmiseks.
Adam (Adaptive Moment Estimation) on veel üks silmapaistev variatsioon, mis on adaptiivne õppimiskiiruse optimeerimise lähenemisviis, mis hõlmab nii RMSpropi kui ka impulsi eeliseid.
Adam muudab iga parameetri õppimiskiirust dünaamiliselt, tuginedes varasemale gradiendi teabele, mille tulemuseks võib olla mittekumerate funktsioonide parem konvergents.
Need keerukad gradiendi laskumisvariatsioonid on osutunud tõhusaks üha keerukamate funktsioonide käsitlemisel ja neist on saanud standardsed tööriistad masinõppes ja süvaõppes, kus mittekumerad optimeerimisprobleemid on tavalised.
6. samm: visualiseerige oma edusamme
Vaatame gradiendi laskumisalgoritmi edenemist, et saada paremini aru selle iteratiivsest protsessist. Vaatleme graafikut, mille x-telg tähistab iteratsioone ja y-telg funktsiooni f(x) väärtust.
Algoritmi itereerimisel läheneb x väärtus nullile ja selle tulemusena funktsiooni väärtus iga sammuga langeb. Graafikul kujutatuna näitaks see selget langustrendi, mis peegeldab algoritmi edenemist miinimumini jõudmisel.
7. samm: õppimiskiiruse peenhäälestus
Õppimiskiirus () on algoritmi toimimise oluline tegur. Praktikas nõuab ideaalse õppimiskiiruse määramine sageli katse-eksituse meetodit.
Mõned optimeerimismeetodid, näiteks õppimiskiiruse ajakava, võivad õppimiskiirust treeningu ajal dünaamiliselt muuta, alustades suuremast väärtusest ja vähendades seda järk-järgult, kui algoritm läheneb lähenemisele.
See meetod aitab leida tasakaalu kiire arengu alguses ja stabiilsuse vahel optimeerimisprotsessi lõpus.
Teine näide: ruutfunktsiooni minimeerimine
Gradiendi laskumise paremaks mõistmiseks vaatame veel ühte näidet.
Vaatleme kahemõõtmelist ruutfunktsiooni g(x) = (x – 5)^2. Kui x = 5, on sellel funktsioonil samuti miinimum. Selle miinimumi leidmiseks rakendame gradiendi laskumist.
1. Initsialiseerimine: alustame lähtepunktist x0 = 8.
2. Arvutage g(x) gradient: g'(x) = 2(x – 5). Kui asendame x0 = 8, on gradient x0 juures 2 * (8–5) = 6.
3. Kui meie õppimiskiirus on = 0.2, värskendame x-i järgmiselt: x = x₀ – α * g'(x₀) = 8 – 0.2 * 6 = 6.8.
4. Korda: kordame samme 2 ja 3 nii mitu korda kui vaja, kuni saavutatakse konvergents. Iga tsükkel toob x lähemale 5-le, minimaalne väärtus g(x) = (x – 5)2.
5. Konvergents: meetod läheneb lõpuks väärtusele x = 5, mis on g(x) = (x – 5)2 minimaalne väärtus.
Õppimismäärade võrdlus
Võrdleme gradiendi laskumise konvergentsi kiirust erinevate õppimiskiiruste korral, näiteks α = 0.1, α = 0.2 ja α = 0.5 meie uues näites. Näeme, et madalam õppimismäär (nt = 0.1) toob kaasa pikema konvergentsi, kuid täpsema miinimumi.
Kõrgem õppimismäär (nt = 0.5) läheneb kiiremini, kuid võib ületada või kõikuda miinimumist, mille tulemuseks on halvem täpsus.
Multimodaalne näide mittekumerate funktsioonide käsitlemisest
Vaatame h(x) = sin(x) + 0.5x, mittekumerat funktsiooni.
Selle funktsiooni jaoks on mitu kohalikku miinimumi ja maksimumi. Sõltuvalt lähteasendist ja õppimiskiirusest võiksime standardse gradiendi laskumise abil läheneda mis tahes kohalikule miinimumile.
Saame selle lahendada täiustatud optimeerimistehnikate, nagu Adam või stohhastilise gradiendi laskumise (SGD) abil. Need meetodid kasutavad funktsiooni maastiku erinevate piirkondade uurimiseks adaptiivseid õppimismäärasid või juhuslikku valimit, suurendades sellega parema miinimumi saavutamise tõenäosust.
Järeldus
Gradiendi laskumisalgoritmid on võimsad optimeerimistööriistad, mida kasutatakse laialdaselt paljudes tööstusharudes. Nad avastavad funktsiooni madalaima (või maksimumi), värskendades parameetreid iteratiivselt, võttes aluseks gradiendi suuna.
Algoritmi iteratiivse olemuse tõttu saab see hakkama suuremõõtmeliste ruumide ja keerukate funktsioonidega, muutes selle masinõppes ja andmetöötluses asendamatuks.
Gradiendiga laskumine saab hõlpsasti toime tulla reaalsete raskustega ning aidata oluliselt kaasa tehnoloogia kasvule ja andmepõhisele otsustusprotsessile, valides hoolikalt õppimiskiiruse ja rakendades täiustatud variatsioone, nagu stohhastiline gradient laskumine ja Adam.




Jäta vastus