Ni alfrontas optimumigajn problemojn en multaj realaj cirkonstancoj kie ni devas identigi la minimumon aŭ maksimumon de funkcio.
Konsideru funkcion kiel matematika reprezentado de sistemo, kaj determini ĝian minimumon aŭ maksimumon povas esti kritika por diversaj aplikoj kiel maŝinlernado, inĝenieristiko, financo kaj aliaj.
Konsideru pejzaĝon kun montetoj kaj valoj, kaj nia celo estas trovi la plej malaltan punkton (minimuman) por atingi nian celon kiel eble plej rapide.
Ni ofte uzas gradientajn descendajn algoritmojn por solvi tiajn optimumigajn defiojn. Tiuj algoritmoj estas ripetaj optimumigaj metodoj por minimumigi funkcion prenante paŝojn en la direkto de la plej kruta deveno (negativa gradiento).
La gradiento reflektas la direkton kun la plej kruta pliiĝo en la funkcio, kaj vojaĝi en la kontraŭa direkto kondukas nin al la minimumo.
Kio precize estas la Algoritmo de Gradienta Deveno?
Graddeveno estas populara ripeta optimumiga aliro por determini la minimumon (aŭ maksimumon) de funkcio.
Ĝi estas kritika ilo en pluraj kampoj, inkluzive maŝinlernado, profunda lernado, artefarita inteligenteco, inĝenieristiko kaj financo.
La baza principo de la algoritmo baziĝas sur ĝia uzo de la gradiento, kiu montras la direkton de la plej akra pliiĝo en la valoro de la funkcio.
La algoritmo efike navigas la pejzaĝon de la funkcio direkte al la minimumo plurfoje prenante ŝtupojn en la kontraŭa direkto kiel la gradiento, ripete rafinante la solvon ĝis konverĝo.
Kial Ni Uzas Gradientajn Devenajn Algoritmojn?
Por komenci, ili povas esti uzataj por solvi ampleksan varion de optimumigaj problemoj, inkluzive de tiuj kun altdimensiaj spacoj kaj kompleksaj funkcioj.
Due, ili povas trovi optimumajn solvojn rapide, precipe kiam la analiza solvo estas neatingebla aŭ komputile multekosta.
Gradientaj devenoteknikoj estas tre skaleblaj kaj povas sukcese pritrakti enormajn datumarojn.
Kiel rezulto, ili estas vaste uzataj en maŝinlernaj algoritmoj kiel trejnado de neŭralaj retoj por lerni de datumoj kaj modifi iliajn parametrojn por minimumigi prognozajn erarojn.
Detala Ekzemplo de Gradiaj Devenaj Paŝoj
Ni rigardu pli detalan ekzemplon por pli bone kompreni la teknikon de gradienta descendo.
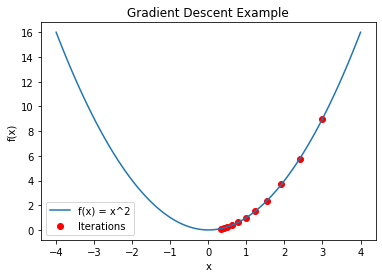
Konsideru la 2D-funkcion f(x) = x2, kiu generas bazan parabolan kurbon kun minimumo ĉe (0,0). La algoritmo de gradienta descendo estos uzata por determini ĉi tiun minimuman punkton.
Paŝo 1: Inicialigo
La gradienta descenda algoritmo komenciĝas per pravalorigo de la variablo x, reprezentita kiel x0.
La komenca valoro povas havi konsiderindan efikon al la efikeco de la algoritmo.
Hazarda inicialigo aŭ utiligi antaŭan scion pri la problemo estas du oftaj teknikoj. Supozu ke x₀ = 3 ĉe la komenco de nia kazo.
Paŝo 2: Kalkulu la Gradienton
La gradiento de la funkcio f(x) ĉe la nuna pozicio x₀. tiam devas esti kalkulita.
La gradiento indikas la deklivon aŭ rapidecon de ŝanĝo de la funkcio ĉe tiu speciala pozicio.
Ni kalkulas la derivaĵon koncerne x por la funkcio f(x) = x2, kiu provizas f'(x) = 2x. Ni ricevas la gradienton ĉe x0 kiel 2 * 3 = 6 anstataŭigante x₀ = 3 en la gradientkalkulon.
Paŝo 3: Ĝisdatigu Parametrojn
Uzante la gradientinformojn, ni ĝisdatigas la valoron de x jene: x = x₀ – α * f'(x₀), kie α (alfa) indikas la lernprocenton.
La lernprocento estas hiperparametro, kiu determinas la grandecon de ĉiu paŝo en la ĝisdatiga procezo. Fiksi taŭgan lernadon estas decida ĉar malrapida lernado povas kaŭzi la algoritmo preni tro da ripetoj por atingi la minimumon.
Alta lernoprocento, aliflanke, povas rezultigi la algoritmon resalti aŭ malsukcesi konverĝi. Ni supozu lernprocenton de α = 0.1 por ĉi tiu ekzemplo.
Paŝo 4: Ripetu
Post kiam ni havas la ĝisdatigitan valoron de x, ni ripetas Paŝojn 2 kaj 3 por antaŭfiksita nombro da ripetoj aŭ ĝis la ŝanĝo en x iĝas minimuma, indikante konverĝon.
La metodo kalkulas la gradienton, ĝisdatigas la valoron de x, kaj daŭrigas la proceduron ĉe ĉiu ripeto, permesante al ĝi proksimiĝi al la minimumo.
Paŝo 5: Konverĝo
La tekniko konverĝas post kelkaj ripetoj al punkto kie pliaj ĝisdatigoj ne materie influas la valoron de la funkcio.
En nia kazo, ĉar la ripetoj daŭras, x alproksimiĝos al 0, kiu estas la minimuma valoro de f(x) = x^2. La nombro da ripetoj necesaj por konverĝo estas determinita per faktoroj kiel ekzemple la lernadofteco elektita kaj la komplekseco de la funkcio estanta optimumigita.
Elektante Lernan Procenton ()
Elekti akcepteblan lernprocenton () estas kritika por la efikeco de la gradienta deveno-algoritmo. Kiel antaŭe deklarite, malalta lernoprocento povas indukti malrapidan konverĝon, dum alta lernprocento povas kaŭzi superfluon kaj malsukceson konverĝi.
Trovi la bonordan ekvilibron estas kritika por certigi ke la algoritmo konverĝas al la celita minimumo kiel eble plej efike.
Agordi la lernprocenton estas ofte prova-erara proceduro en praktiko. Esploristoj kaj praktikistoj rutine eksperimentas kun malsamaj lernprocentoj por vidi kiel ili influas la konverĝon de la algoritmo sur sia aparta defio.
Pritraktado de Ne-Konveksaj Funkcioj
Dum la antaŭa ekzemplo havis simplan konveksan funkcion, multaj realmondaj optimumigaj aferoj implikas ne-konveksajn funkciojn kun multaj lokaj minimumoj.
Dum utiligado de gradientdeveno en tiaj kazoj, la metodo povas konverĝi al loka minimumo prefere ol la tutmonda minimumo.
Pluraj progresintaj formoj de gradientdeveno estis evoluigitaj por venki tiun temon. Stochastic Gradient Descent (SGD) estas unu tia metodo kiu lanĉas hazardon elektante hazardan subaron de datenpunktoj (konataj kiel mini-aro) por komputi la gradienton ĉe ĉiu ripeto.
Ĉi tiu hazarda specimenigo permesas al la algoritmo eviti lokajn minimumojn kaj esplori novajn partojn de la tereno de la funkcio, pliigante la eblecojn malkovri pli bonan minimumon.
Adamo (Adaptive Moment Estimation) estas alia elstara vario, kiu estas adapta lernado-rapida optimumigo aliro kiu korpigas la avantaĝojn de kaj RMSprop kaj impeto.
Adamo modifas la lernadon por ĉiu parametro dinamike surbaze de antaŭaj gradientinformoj, kiuj povus rezultigi pli bonan konverĝon sur ne-konveksaj funkcioj.
Tiuj sofistikaj gradientadevenvarioj pruvis esti efikaj en pritraktado de ĉiam pli kompleksaj funkcioj kaj fariĝis normaj iloj en maŝinlernado kaj profunda lernado, kie ne-konveksaj optimumigaj problemoj estas oftaj.
Paŝo 6: Vidu Vian Progreson
Ni vidu la progreson de la gradienta descenda algoritmo por pli bone kompreni ĝian ripetan procezon. Konsideru grafeon kun x-akso reprezentanta ripetojn kaj y-akso reprezentanta la valoron de la funkcio f(x).
Ĉar la algoritmo ripetas, la valoro de x alproksimiĝas al nulo kaj, kiel rezulto, la funkciovaloro falas kun ĉiu paŝo. Se punktskribite sur grafeo, tio elmontrus klaran malkreskantan tendencon, reflektante la progreson de la algoritmo direkte al atingado de la minimumo.
Paŝo 7: Fajnagordi la Lernado-Indico
La lernprocento () estas grava faktoro en la efikeco de la algoritmo. En praktiko, determini la idealan lernprocenton ofte necesigas provon kaj eraron.
Kelkaj optimumigaj teknikoj, kiel ekzemple lernprocenthoraroj, povas ŝanĝi la lernprocenton dinamike dum trejnado, komencante kun pli alta valoro kaj iom post iom malpliigante ĝin kiam la algoritmo alproksimiĝas al konverĝo.
Ĉi tiu metodo helpas atingi ekvilibron inter rapida disvolviĝo en la komenco kaj stabileco proksime de la fino de la optimumiga procezo.
Alia Ekzemplo: Minimumigo de Kvadratika Funkcio
Ni rigardu alian ekzemplon por pli bone kompreni la gradienta deveno.
Konsideru la dudimensian kvadratan funkcion g(x) = (x – 5)^2. Ĉe x = 5, ĉi tiu funkcio same havas minimumon. Por trovi ĉi tiun minimumon, ni aplikas gradienton.
1. Komencu: Ni komencu per x0 = 8 kiel nia deirpunkto.
2. Kalkulu la gradienton de g(x): g'(x) = 2(x – 5). Kiam ni anstataŭigas x0 = 8, la gradiento ĉe x0 estas 2 * (8 – 5) = 6.
3. Kun = 0.2 kiel nia lernprocento, ni ĝisdatigas x jene: x = x₀ – α * g'(x₀) = 8 – 0.2 * 6 = 6.8.
4. Ripeti: Ni ripetas paŝojn 2 kaj 3 tiom da fojoj kiom necesas ĝis konverĝo estas atingita. Ĉiu ciklo alportas x pli proksime al 5, la minimuma valoro de g(x) = (x – 5)2.
5. Konverĝo: La metodo eventuale konverĝos al x = 5, kiu estas la minimuma valoro de g(x) = (x – 5)2.
Komparo de Lernado de Tarifoj
Ni komparu la konverĝan rapidon de gradienta deveno por malsamaj lernprocentoj, diru α = 0.1, α = 0.2, kaj α = 0.5 en nia nova ekzemplo. Ni povas vidi ke pli malalta lernoprocento (ekz., = 0.1) rezultigos pli longan konverĝon sed pli precizan minimumon.
Pli alta lernprocento (ekz., = 0.5) konverĝos pli rapide sed povas superi aŭ oscili ĉirkaŭ la minimumo, rezultigante pli malbonan precizecon.
Plurmodala Ekzemplo de Ne-Konveksa Funkcitraktado
Konsideru h(x) = sin(x) + 0.5x, nekonveksa funkcio.
Estas pluraj lokaj minimumoj kaj maksimumoj por ĉi tiu funkcio. Depende de la komenca pozicio kaj lernprocento, ni povus konverĝi al iu ajn el la lokaj minimumoj uzante norman gradientdevenon.
Ni povas solvi ĉi tion uzante pli altnivelajn optimumigajn teknikojn kiel Adam aŭ stokasta gradienta deveno (SGD). Tiuj metodoj uzas adaptajn lernoprocentojn aŭ hazardan specimenigon por esplori malsamajn regionojn de la pejzaĝo de la funkcio, pliigante la verŝajnecon de atingado de pli bona minimumo.
konkludo
Gradientaj devenaj algoritmoj estas potencaj optimumigaj iloj, kiuj estas vaste uzataj en ampleksa gamo de industrioj. Ili malkovras la plej malsupran (aŭ maksimuman) de funkcio ripete ĝisdatigante parametrojn bazitajn sur la direkto de la gradiento.
Pro la ripeta naturo de la algoritmo, ĝi povas pritrakti altdimensiajn spacojn kaj kompleksajn funkciojn, igante ĝin nemalhavebla en maŝinlernado kaj datumtraktado.
Graddeveno povas facile trakti realmondajn malfacilaĵojn kaj multe kontribui al la kresko de teknologio kaj datum-movita decidado zorge elektante la lernprocenton kaj aplikante altnivelajn variojn kiel stokasta gradienta deveno kaj Adam.




Lasi Respondon