Chúng tôi phải đối mặt với các vấn đề tối ưu hóa trong nhiều trường hợp trong thế giới thực, nơi chúng tôi cần xác định mức tối thiểu hoặc tối đa của hàm.
Hãy coi một hàm là biểu diễn toán học của một hệ thống và việc xác định mức tối thiểu hoặc tối đa của nó có thể rất quan trọng đối với nhiều ứng dụng như học máy, kỹ thuật, tài chính và các ứng dụng khác.
Hãy xem xét một cảnh quan với những ngọn đồi và thung lũng, và mục tiêu của chúng tôi là tìm điểm thấp nhất (tối thiểu) để đến đích càng nhanh càng tốt.
Chúng tôi thường sử dụng các thuật toán giảm độ dốc để giải quyết các thách thức tối ưu hóa như vậy. Các thuật toán này là các phương pháp tối ưu hóa lặp đi lặp lại để giảm thiểu hàm bằng cách thực hiện các bước theo hướng dốc nhất (độ dốc âm).
Độ dốc phản ánh hướng có hàm tăng mạnh nhất và di chuyển theo hướng ngược lại sẽ đưa chúng ta đến mức tối thiểu.
Thuật toán Gradient Descent chính xác là gì?
Độ dốc gốc là một phương pháp tối ưu hóa lặp đi lặp lại phổ biến để xác định mức tối thiểu (hoặc tối đa) của hàm.
Nó là một công cụ quan trọng trong một số lĩnh vực, bao gồm học máy, học sâu, trí tuệ nhân tạo, kỹ thuật và tài chính.
Nguyên tắc cơ bản của thuật toán dựa trên việc sử dụng gradient, hiển thị hướng tăng mạnh nhất trong giá trị của hàm.
Thuật toán điều hướng một cách hiệu quả cảnh quan của hàm về phía mức tối thiểu bằng cách thực hiện lặp lại các bước theo hướng ngược lại dưới dạng độ dốc, lặp đi lặp lại việc tinh chỉnh giải pháp cho đến khi hội tụ.
Tại sao chúng ta sử dụng các thuật toán giảm dần độ dốc?
Đối với người mới bắt đầu, chúng có thể được sử dụng để giải nhiều bài toán tối ưu hóa, bao gồm cả những bài toán có không gian nhiều chiều và hàm phức tạp.
Thứ hai, họ có thể nhanh chóng tìm ra các giải pháp tối ưu, đặc biệt là khi giải pháp phân tích không có sẵn hoặc tốn kém về mặt tính toán.
Các kỹ thuật giảm độ dốc có khả năng mở rộng cao và có thể xử lý thành công các bộ dữ liệu khổng lồ.
Kết quả là, chúng được sử dụng rộng rãi trong thuật toán học máy như đào tạo các mạng lưới thần kinh để học hỏi từ dữ liệu và sửa đổi các tham số của chúng để giảm thiểu các lỗi dự đoán.
Một ví dụ chi tiết về các bước giảm độ dốc
Hãy xem xét một ví dụ chi tiết hơn để hiểu rõ hơn về kỹ thuật giảm dần độ dốc.
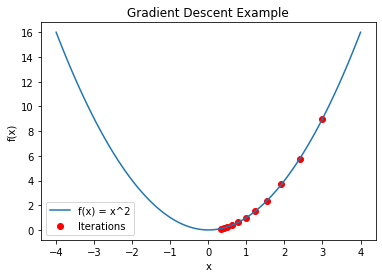
Xét hàm 2D f(x) = x2, hàm này tạo ra một đường cong parabol cơ bản có cực tiểu tại (0,0). Thuật toán giảm độ dốc sẽ được sử dụng để xác định điểm cực tiểu này.
Bước 1: Khởi tạo
Thuật toán giảm độ dốc bắt đầu bằng cách khởi tạo giá trị của biến x, được biểu thị là x0.
Giá trị ban đầu có thể có tác động đáng kể đến hiệu suất của thuật toán.
Khởi tạo ngẫu nhiên hoặc sử dụng kiến thức trước đó về vấn đề là hai kỹ thuật phổ biến. Giả sử rằng x₀ = 3 khi bắt đầu trường hợp của chúng tôi.
Bước 2: Tính toán Gradient
Độ dốc của hàm f(x) tại vị trí hiện tại x₀. sau đó phải được tính toán.
Độ dốc biểu thị độ dốc hoặc tốc độ thay đổi của hàm tại vị trí cụ thể đó.
Chúng ta tính đạo hàm liên quan đến x cho hàm f(x) = x2, cung cấp f'(x) = 2x. Chúng ta nhận được độ dốc tại x0 là 2 * 3 = 6 bằng cách thay x₀ = 3 vào phép tính độ dốc.
Bước 3: Cập nhật thông số
Sử dụng thông tin độ dốc, chúng tôi cập nhật giá trị của x như sau: x = x₀ – α * f'(x₀), trong đó α (alpha) biểu thị tốc độ học tập.
Tốc độ học là một siêu tham số xác định kích thước của từng bước trong quá trình cập nhật. Đặt tốc độ học thích hợp là rất quan trọng vì tốc độ học chậm có thể gây ra thuật toán để mất quá nhiều lần lặp lại để đạt được mức tối thiểu.
Mặt khác, tốc độ học tập cao có thể dẫn đến thuật toán bị trả lại hoặc không hội tụ. Chúng ta hãy giả sử tốc độ học tập của α = 0.1 vì lợi ích của ví dụ này.
Bước 4: Lặp lại
Sau khi chúng tôi có giá trị cập nhật của x, chúng tôi lặp lại Bước 2 và 3 cho một số lần lặp được xác định trước hoặc cho đến khi thay đổi trong x trở nên nhỏ nhất, biểu thị sự hội tụ.
Phương thức tính toán độ dốc, cập nhật giá trị của x và tiếp tục quy trình ở mỗi lần lặp lại, cho phép nó tiến gần đến mức tối thiểu.
Bước 5: Hội tụ
Kỹ thuật này hội tụ sau một vài lần lặp đến một điểm mà các bản cập nhật tiếp theo không ảnh hưởng đáng kể đến giá trị của hàm.
Trong trường hợp của chúng ta, khi tiếp tục lặp lại, x sẽ tiến dần đến 0, là giá trị nhỏ nhất của f(x) = x^2. Số lần lặp cần thiết để hội tụ được xác định bởi các yếu tố như tốc độ học đã chọn và độ phức tạp của hàm được tối ưu hóa.
Chọn tỷ lệ học tập ()
Việc chọn tốc độ học chấp nhận được ( ) là rất quan trọng đối với hiệu quả của thuật toán giảm độ dốc. Như đã nêu trước đây, tốc độ học thấp có thể gây ra sự hội tụ chậm, trong khi tốc độ học cao có thể gây ra hiện tượng vượt quá và không hội tụ.
Việc tìm kiếm sự cân bằng phù hợp là rất quan trọng để đảm bảo rằng thuật toán hội tụ đến mức tối thiểu dự định một cách hiệu quả nhất có thể.
Điều chỉnh tốc độ học tập thường là một quy trình thử và sai trong thực tế. Các nhà nghiên cứu và học viên thường xuyên thử nghiệm các tốc độ học tập khác nhau để xem chúng ảnh hưởng như thế nào đến sự hội tụ của thuật toán đối với thách thức cụ thể của họ.
Xử lý các hàm không lồi
Trong khi ví dụ trước có một hàm lồi đơn giản, nhiều vấn đề tối ưu hóa trong thế giới thực liên quan đến các hàm không lồi với nhiều cực tiểu cục bộ.
Khi sử dụng giảm độ dốc trong những trường hợp như vậy, phương pháp có thể hội tụ đến mức tối thiểu cục bộ thay vì mức tối thiểu toàn cầu.
Một số hình thức giảm độ dốc tiên tiến đã được phát triển để khắc phục vấn đề này. Stochastic Gradient Descent (SGD) là một trong những phương pháp giới thiệu tính ngẫu nhiên bằng cách chọn một tập hợp con ngẫu nhiên các điểm dữ liệu (được gọi là lô nhỏ) để tính toán độ dốc ở mỗi lần lặp.
Việc lấy mẫu ngẫu nhiên này cho phép thuật toán tránh được điểm cực tiểu cục bộ và khám phá các phần mới trong địa hình của hàm, tăng cơ hội khám phá điểm cực tiểu tốt hơn.
Adam (Ước tính thời điểm thích ứng) là một biến thể nổi bật khác, là phương pháp tối ưu hóa tốc độ học tập thích ứng kết hợp các lợi ích của cả RMSprop và động lượng.
Adam sửa đổi tốc độ học cho từng tham số một cách linh hoạt dựa trên thông tin độ dốc trước đó, điều này có thể dẫn đến sự hội tụ tốt hơn trên các hàm không lồi.
Các biến thể giảm độ dốc tinh vi này đã được chứng minh là có hiệu quả trong việc xử lý các chức năng ngày càng phức tạp và đã trở thành công cụ tiêu chuẩn trong học máy và học sâu, nơi các vấn đề tối ưu hóa không lồi là phổ biến.
Bước 6: Trực quan hóa tiến trình của bạn
Hãy xem tiến trình của thuật toán giảm dần độ dốc để hiểu rõ hơn về quá trình lặp của nó. Xét một đồ thị có trục x biểu thị các phép lặp và trục y biểu thị giá trị của hàm f(x).
Khi thuật toán lặp lại, giá trị của x tiến dần đến XNUMX và kết quả là giá trị hàm giảm xuống theo từng bước. Khi được vẽ trên biểu đồ, điều này sẽ thể hiện xu hướng giảm rõ rệt, phản ánh tiến trình của thuật toán để đạt đến mức tối thiểu.
Bước 7: Tinh chỉnh tốc độ học tập
Tỷ lệ học tập () là một yếu tố quan trọng trong hiệu suất của thuật toán. Trong thực tế, việc xác định tỷ lệ học tập lý tưởng thường đòi hỏi phải thử và sai.
Một số kỹ thuật tối ưu hóa, chẳng hạn như lịch biểu tốc độ học tập, có thể thay đổi tốc độ học tập một cách linh hoạt trong quá trình đào tạo, bắt đầu với giá trị cao hơn và giảm dần giá trị đó khi thuật toán tiến tới hội tụ.
Phương pháp này giúp đạt được sự cân bằng giữa sự phát triển nhanh chóng lúc đầu và sự ổn định ở gần cuối quá trình tối ưu hóa.
Một ví dụ khác: Tối thiểu hóa hàm bậc hai
Hãy xem xét một ví dụ khác để hiểu rõ hơn về giảm dần độ dốc.
Xét hàm bậc hai hai chiều g(x) = (x – 5)^2. Tại x = 5, hàm số này cũng có cực tiểu. Để tìm mức tối thiểu này, chúng tôi sẽ áp dụng giảm dần độ dốc.
1. Khởi tạo: Hãy bắt đầu với x0 = 8 là điểm xuất phát của chúng ta.
2. Tính độ dốc của g(x): g'(x) = 2(x – 5). Khi chúng ta thay thế x0 = 8, độ dốc tại x0 là 2 * (8 – 5) = 6.
3. Với tốc độ học = 0.2, chúng tôi cập nhật x như sau: x = x₀ – α * g'(x₀) = 8 – 0.2 * 6 = 6.8.
4. Lặp lại: Chúng tôi lặp lại các bước 2 và 3 nhiều lần nếu cần cho đến khi đạt được sự hội tụ. Mỗi chu kỳ đưa x tiến gần hơn đến 5, giá trị nhỏ nhất của g(x) = (x – 5)2.
5. Hội tụ: Phương pháp cuối cùng sẽ hội tụ đến x = 5, là giá trị nhỏ nhất của g(x) = (x – 5)2.
So sánh tỷ lệ học tập
Hãy so sánh tốc độ hội tụ của độ dốc giảm dần đối với các tốc độ học tập khác nhau, giả sử α = 0.1, α = 0.2 và α = 0.5 trong ví dụ mới của chúng tôi. Chúng ta có thể thấy rằng tốc độ học thấp hơn (ví dụ: = 0.1) sẽ dẫn đến sự hội tụ lâu hơn nhưng mức tối thiểu chính xác hơn.
Tốc độ học cao hơn (ví dụ: = 0.5) sẽ hội tụ nhanh hơn nhưng có thể vượt quá hoặc dao động về mức tối thiểu, dẫn đến độ chính xác kém hơn.
Một ví dụ đa phương thức về xử lý hàm không lồi
Xét h(x) = sin(x) + 0.5x, một hàm không lồi.
Có một số cực tiểu và cực đại cục bộ cho hàm này. Tùy thuộc vào vị trí bắt đầu và tốc độ học tập, chúng tôi có thể hội tụ đến bất kỳ cực tiểu cục bộ nào bằng cách sử dụng độ dốc tiêu chuẩn.
Chúng ta có thể giải quyết vấn đề này bằng cách sử dụng các kỹ thuật tối ưu hóa nâng cao hơn như Adam hoặc giảm độ dốc ngẫu nhiên (SGD). Các phương pháp này sử dụng tốc độ học thích ứng hoặc lấy mẫu ngẫu nhiên để khám phá các vùng khác nhau trong bối cảnh của hàm, tăng khả năng đạt được mức tối thiểu tốt hơn.
Kết luận
Thuật toán giảm độ dốc là công cụ tối ưu hóa mạnh mẽ được sử dụng rộng rãi trong nhiều ngành công nghiệp. Họ khám phá mức thấp nhất (hoặc tối đa) của hàm bằng cách cập nhật lặp lại các tham số dựa trên hướng của dải màu.
Do tính chất lặp lại của thuật toán, nó có thể xử lý các không gian nhiều chiều và các chức năng phức tạp, khiến nó không thể thiếu trong máy học và xử lý dữ liệu.
Giảm dần độ dốc có thể dễ dàng giải quyết các khó khăn trong thế giới thực và góp phần to lớn vào sự phát triển của công nghệ và quá trình ra quyết định dựa trên dữ liệu bằng cách lựa chọn cẩn thận tốc độ học tập và áp dụng các biến thể nâng cao như giảm dần độ dốc ngẫu nhiên và Adam.




Bình luận