Mundarija[Yashirish][Show]
"Robotika" so'zini eshitganingizda xayolingizga nima keladi? Ko'pchilik elektr toki bilan ishlaydigan metall mashinani tasavvur qiladi. Ilmiy fantastikada ko'p uchraydigan robotlar turlariga erishish uchun ko'plab yutuqlarga erishilayotgan bo'lsa-da, robototexnikaning yana bir sohasi sizni hayratda qoldirishi mumkin.
So'nggi bir necha yil ichida yumshoq jismli robototexnikaga qiziqish ortdi. Ushbu turdagi robotlarga turli yo'llar bilan erishish mumkin. Biroq, umumiy mavzu turli kontekstlarda ham xavfsiz, ham moslashuvchan robotlarni yaratish uchun elastik materiallardan foydalanishdir.
An'anaviy qattiq jismli robotlar, masalan, yarim avtomatlashtirilgan zavodda topishingiz mumkin bo'lgan narsalar ko'pincha ma'lum muhitlarga mos kelmaydi. Ushbu turdagi robotlar odatda to'qnashuvlarning oldini olish uchun aniq harakatlar va algoritmlarga tayanadi. Amaldagi material odamlarga yaqin joyda qo'llanilganda ham xavfli bo'lishi mumkin.
Dunyo bo'ylab ideal yumshoq jismli robotni yaratishga harakat qilayotgan ko'plab tadqiqot laboratoriyalari mavjud.
Ushbu blogda biz Xitoyning Gonkong universitetining so'nggi ishlanmasini - magnit shilimshiq robot deb ataladigan narsalarni ko'rib chiqamiz. Shuningdek, biz yangi texnologiyaning amaliy qo‘llanilishi va uning joriy cheklovlarini o‘rganamiz.
Yumshoq robototexnika nima?
Yumshoq robototexnika robototexnikaning kichik sohasi bo'lib, u mos materiallardan tashkil topgan robotlarni loyihalash va ishlab chiqishga qaratilgan.
Muvofiq deganda nimani tushunamiz? Mashinasozlikda "mos" atamasi elastik deformatsiya orqali harakatga erishadigan mexanizm turiga ishora qiladi. Bu hozirgi robotlarda ko'rishingiz mumkin bo'lgan odatiy qattiq jismlardan farqli o'laroq.
Ko'pgina qattiq jismli robotlar yumshoq komponentlardan strategik foydalansa-da, yumshoq robototexnika sohasidagi tadqiqotlar odatda to'liq yumshoq mashinaga qaratilgan.
Yumshoq robot qanday harakat qilishini qiziqtirgandirsiz. Tadqiqotchilar ko'plab qattiq robotlarda uchraydigan metall ramkasiz yumshoq robotlarni boshqarishning yangi usullarini ishlab chiqishlari kerak edi.
Ba'zi tadqiqotchilar materiallarning shaklini o'zgartirish uchun elektrostatik kuchdan foydalanadilar. Boshqa yumshoq robotlar materialga issiqlik kiritilganda shakli o'zgarishi mumkin bo'lgan maxsus polimerlardan foydalanadi. Ushbu materiallar ko'plab harorat o'zgarishlaridan keyin ham asl shaklini eslab qoladi.
Magnit aktuatsiyadan foydalanish
Tadqiqotchilar magnit bilan ishlaydigan yumshoq robotlarni yaratishni ham ko'rib chiqdilar. Gonkongdagi Xitoy universiteti tadqiqotchilari kashshof a yumshoq jismli robotlarning yangi shakli Nyuton bo'lmagan suyuqlikka asoslangan "slim" robotni boshqarish uchun magnitlardan foydalanadigan.
Tadqiqotchilar magnit yumshoq jismli robotlar bo‘yicha oldingi tadqiqotlardan boshqa turdagi materialdan foydalanishga harakat qilishdi.
Oldingi tadqiqotlarda kelgan silikon yoki ferrofluid ishlatilgan ularning cheklovlari bilan. Elastomer asosidagi yoki silikon yumshoq robotlar cheklangan deformatsiyaga ega edi, ferrofluid esa ko'p foydalanish holatlari uchun juda beqaror deb hisoblanadi.
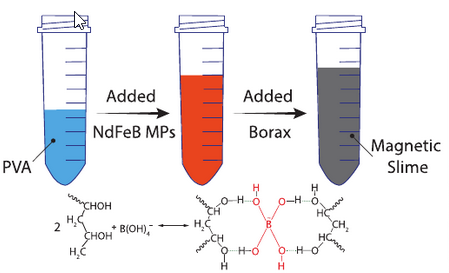
Gonkonglik tadqiqotchilar polivinil spirti (PVA) va boraks aralashmasidan shilimshiq yaratdilar. Suyuqlikka mayda magnit zarralar aralashib, tadqiqotchilarga suyuqlikni magnit maydon yordamida boshqarishga imkon berdi.

Nyuton bo'lmagan suyuqlik o'z-o'zini davolash xususiyatiga ega bo'lib, robotga boshqa alohida qismlar bilan bog'lanish va bir butunga birlashish imkonini berdi.
Ilovalar va cheklovlar
Robotning tor kanallar bo'ylab harakat qilish qobiliyati ba'zi imkoniyatlarga olib keldi sog'liqni saqlash sohasidagi ilovalar.
Masalan, shilimshiq robot odam tomonidan yutib yuborilishi va jarrohlik amaliyotisiz zararli narsalarni olish uchun ishlatilishi mumkin.
Tadqiqotchilar, shuningdek, o'z maqolalarida ishlatiladigan suyuqlik ham o'tkazuvchan ekanligini ko'rsatdi. Bu shuni anglatadiki, magnit shilimshiq kontaktlarning zanglashiga olib keladigan kaliti va, ehtimol, shikastlangan kontaktlarning zanglashiga olib ta'mirlash vositasi sifatida ishlaydi.
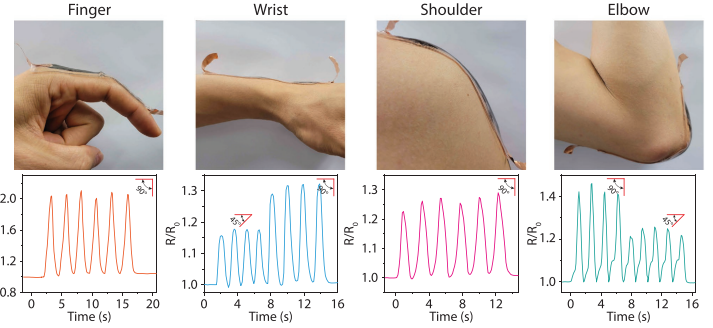
Magnit shilimshiq egilish va dinamik mexanik muhitlarga moslasha oladigan harakat sensori sifatida ishlashi mumkin.
Garchi bu ilovalarning barchasi hali ham istiqbolli bo'lsa-da, eng yaxshi holatda taklif bo'lib qolmoqda va shilimshiq robotning ish faoliyatini yanada yaxshilash uchun ko'proq tadqiqotlar o'tkazish kerak bo'ladi.
Tadqiqotchilar shilimshiqning o'zi zaharli ekanligini va hozirda inson tanasida foydalanish uchun mos emasligini ta'kidladilar. Shilimshiqni boshqaradigan magnit zarralar shilimshiq robotni zaharli qiladi. Tadqiqotchilar shilimshiqni ishlatish uchun xavfsiz bo'lishi uchun silika qoplama qatlamini qo'shishlari kerak edi.
Xulosa
Yumshoq robototexnika sohasi hali ham nisbatan yangi, ammo allaqachon ko'p va'dalarni ko'rsatmoqda. Yumshoq jismli robotlardan tibbiy va jarrohlik amaliyotlarida foydalanish ko'proq hayotni saqlab qolishga olib kelishi mumkin. Yumshoq robotlar g'oyasi nogironlarga yordam berishi mumkin.
NASA olimlari buni boshlaganidan hatto hayratda qoldim rivojlantirish astronavtlarning orbita paytida xavfsiz bo'lishiga yordam beradigan yumshoq jismli robotlar.
Umid qilamizki, ko'proq tadqiqotlar odamlar mashinalarga tobora ko'proq ishonadigan dunyoda yumshoq robototexnikaning to'liq imkoniyatlarini ochib beradi.
Yumshoq robototexnika kelajagi haqida qanday fikrdasiz?



Leave a Reply