Ми стикаємося з проблемами оптимізації в багатьох реальних обставинах, коли нам потрібно визначити мінімум або максимум функції.
Розглянемо функцію як математичне представлення системи, і визначення її мінімуму або максимуму може бути критичним для різноманітних застосувань, таких як машинне навчання, інженерія, фінанси тощо.
Розглянемо ландшафт з пагорбами та долинами, і наша мета — знайти найнижчу точку (мінімум), щоб дістатися до місця призначення якомога швидше.
Ми часто використовуємо алгоритми градієнтного спуску для вирішення таких завдань оптимізації. Ці алгоритми є методами ітераційної оптимізації для мінімізації функції шляхом виконання кроків у напрямку найкрутішого спуску (негативний градієнт).
Градієнт відображає напрямок із найкрутішим зростанням функції, а рух у протилежному напрямку веде нас до мінімуму.
Що таке алгоритм градієнтного спуску?
Градієнтний спуск — це популярний підхід ітераційної оптимізації для визначення мінімуму (або максимуму) функції.
Це критично важливий інструмент у кількох сферах, зокрема навчання за допомогою машини, глибоке навчання, штучний інтелект, інженерія та фінанси.
Основний принцип алгоритму заснований на використанні градієнта, який відображає напрямок найбільш різкого зростання значення функції.
Алгоритм ефективно переміщує ландшафт функції до мінімуму, багаторазово роблячи кроки в протилежному напрямку від градієнта, ітеративно уточнюючи рішення до збіжності.
Чому ми використовуємо алгоритми градієнтного спуску?
По-перше, їх можна використовувати для вирішення широкого спектру задач оптимізації, у тому числі з просторами великої розмірності та складними функціями.
По-друге, вони можуть швидко знаходити оптимальні рішення, особливо коли аналітичне рішення недоступне або вимагає великих обчислень.
Методи градієнтного спуску мають високу масштабованість і можуть успішно обробляти величезні набори даних.
Як наслідок, вони широко використовуються в алгоритми машинного навчання як навчання нейронних мереж навчатися на даних і змінювати їхні параметри, щоб мінімізувати помилки передбачення.
Детальний приклад кроків градієнтного спуску
Давайте розглянемо більш детальний приклад, щоб краще зрозуміти техніку градієнтного спуску.
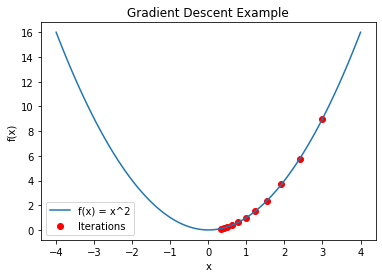
Розглянемо двовимірну функцію f(x) = x2, яка генерує базову параболічну криву з мінімумом у (2). Для визначення цієї мінімальної точки буде використано алгоритм градієнтного спуску.
Крок 1: Ініціалізація
Алгоритм градієнтного спуску починається з ініціалізації значення змінної x, представленої як x0.
Початкове значення може мати значний вплив на продуктивність алгоритму.
Випадкова ініціалізація або використання попередніх знань про проблему є двома поширеними методами. Припустимо, що x₀ = 3 на початку нашого випадку.
Крок 2: Обчисліть градієнт
Градієнт функції f(x) у поточній позиції x₀. потім необхідно розрахувати.
Градієнт вказує нахил або швидкість зміни функції в цій конкретній позиції.
Ми обчислюємо похідну відносно x для функції f(x) = x2, яка забезпечує f'(x) = 2x. Ми отримуємо градієнт на x0 як 2 * 3 = 6, підставляючи x₀ = 3 у обчислення градієнта.
Крок 3: Оновіть параметри
Використовуючи інформацію про градієнт, ми оновлюємо значення x таким чином: x = x₀ – α * f'(x₀), де α (альфа) позначає швидкість навчання.
Швидкість навчання — це гіперпараметр, який визначає розмір кожного кроку в процесі оновлення. Встановлення належної швидкості навчання має вирішальне значення, оскільки низька швидкість навчання може спричинити алгоритм зробити занадто багато повторень, щоб досягти мінімуму.
Висока швидкість навчання, з іншого боку, може призвести до відскоку алгоритму або нездатності збігатися. Для цього прикладу припустімо швидкість навчання α = 0.1.
Крок 4: Повторіть
Отримавши оновлене значення x, ми повторюємо кроки 2 і 3 протягом заздалегідь визначеної кількості ітерацій або доки зміна x не стане мінімальною, що вказує на конвергенцію.
Метод обчислює градієнт, оновлює значення x і продовжує процедуру на кожній ітерації, дозволяючи йому наблизитися до мінімуму.
Крок 5: Конвергенція
Техніка сходиться після кількох ітерацій до точки, де подальші оновлення суттєво не впливають на значення функції.
У нашому випадку, коли ітерації триватимуть, x буде наближатися до 0, що є мінімальним значенням f(x) = x^2. Кількість ітерацій, необхідних для конвергенції, визначається такими факторами, як обрана швидкість навчання та складність функції, що оптимізується.
Вибір швидкості навчання ()
Вибір прийнятної швидкості навчання () має вирішальне значення для ефективності алгоритму градієнтного спуску. Як було сказано раніше, низька швидкість навчання може спричинити повільну конвергенцію, тоді як висока швидкість навчання може спричинити перевищення та нездатність конвергенції.
Знаходження належного балансу має вирішальне значення для того, щоб алгоритм якомога ефективніше збігався з наміченим мінімумом.
Регулювання швидкості навчання на практиці часто є процедурою проб і помилок. Дослідники та практики регулярно експериментують з різними темпами навчання, щоб побачити, як вони впливають на конвергенцію алгоритму для їх конкретного завдання.
Обробка неопуклих функцій
У той час як у попередньому прикладі була проста опукла функція, багато проблем оптимізації в реальному світі стосуються невипуклих функцій із багатьма локальними мінімумами.
При використанні градієнтного спуску в таких випадках метод може сходитися до локального мінімуму, а не до глобального мінімуму.
Щоб подолати цю проблему, було розроблено кілька вдосконалених форм градієнтного спуску. Стохастичний градієнтний спуск (SGD) є одним із таких методів, який вводить випадковість шляхом вибору випадкової підмножини точок даних (відомих як міні-пакет) для обчислення градієнта на кожній ітерації.
Ця випадкова вибірка дозволяє алгоритму уникати локальних мінімумів і досліджувати нові частини рельєфу функції, збільшуючи шанси виявити кращий мінімум.
Adam (Adaptive Moment Estimation) — це ще одна відома варіація, яка є адаптивним підходом до оптимізації швидкості навчання, який включає в себе переваги як RMSprop, так і momentum.
Адам динамічно змінює швидкість навчання для кожного параметра на основі попередньої інформації про градієнт, що може призвести до кращої збіжності неопуклих функцій.
Ці складні варіації градієнтного спуску довели свою ефективність у обробці дедалі складніших функцій і стали стандартними інструментами в машинному та глибокому навчанні, де часто зустрічаються проблеми опуклої оптимізації.
Крок 6: Візуалізуйте свій прогрес
Давайте подивимось на прогрес алгоритму градієнтного спуску, щоб краще зрозуміти його ітераційний процес. Розглянемо графік із віссю абсцис, що представляє ітерації, і віссю у, що представляє значення функції f(x).
Коли алгоритм повторюється, значення x наближається до нуля, і, як наслідок, значення функції падає з кожним кроком. Якщо нанести на графік, це демонструватиме чітку тенденцію до зменшення, що відображає прогрес алгоритму до досягнення мінімуму.
Крок 7: Точне налаштування швидкості навчання
Швидкість навчання () є важливим фактором продуктивності алгоритму. На практиці визначення ідеальної швидкості навчання часто вимагає методу проб і помилок.
Деякі методи оптимізації, такі як графіки темпів навчання, можуть динамічно змінювати швидкість навчання під час навчання, починаючи з вищого значення та поступово зменшуючи його, коли алгоритм наближається до конвергенції.
Цей метод допомагає знайти баланс між швидким розвитком на початку та стабільністю наприкінці процесу оптимізації.
Інший приклад: мінімізація квадратичної функції
Давайте розглянемо інший приклад, щоб краще зрозуміти градієнтний спуск.
Розглянемо двовимірну квадратичну функцію g(x) = (x – 5)^2. При x = 5 ця функція також має мінімум. Щоб знайти цей мінімум, застосуємо градієнтний спуск.
1. Ініціалізація: Почнемо з x0 = 8 як нашої початкової точки.
2. Обчисліть градієнт g(x): g'(x) = 2(x – 5). Коли ми підставляємо x0 = 8, градієнт у x0 дорівнює 2 * (8 – 5) = 6.
3. Використовуючи швидкість навчання = 0.2, ми оновлюємо x таким чином: x = x₀ – α * g'(x₀) = 8 – 0.2 * 6 = 6.8.
4. Ітерація: ми повторюємо кроки 2 і 3 стільки разів, скільки необхідно, доки не буде досягнуто збіжності. Кожен цикл наближає x до 5, мінімального значення g(x) = (x – 5)2.
5. Збіжність: метод зрештою зійде до x = 5, що є мінімальним значенням g(x) = (x – 5)2.
Порівняння темпів навчання
Давайте порівняємо швидкість конвергенції градієнтного спуску для різних темпів навчання, скажімо, α = 0.1, α = 0.2 і α = 0.5 у нашому новому прикладі. Ми бачимо, що нижча швидкість навчання (наприклад, = 0.1) призведе до довшої конвергенції, але більш точного мінімуму.
Вищий рівень навчання (наприклад, = 0.5) сходитиметься швидше, але може перевищувати або коливатися навколо мінімуму, що призведе до нижчої точності.
Мультимодальний приклад роботи з невипуклою функцією
Розглянемо h(x) = sin(x) + 0.5x, неопуклу функцію.
Для цієї функції існує кілька локальних мінімумів і максимумів. Залежно від початкової позиції та швидкості навчання ми могли б сходитися до будь-якого з локальних мінімумів, використовуючи стандартний градієнтний спуск.
Ми можемо вирішити це за допомогою більш просунутих методів оптимізації, таких як Адам або стохастичний градієнтний спуск (SGD). Ці методи використовують адаптивні темпи навчання або випадкову вибірку для дослідження різних регіонів ландшафту функції, збільшуючи ймовірність досягнення кращого мінімуму.
Висновок
Алгоритми градієнтного спуску є потужними інструментами оптимізації, які широко використовуються в багатьох галузях промисловості. Вони виявляють найнижчу (або максимальну) функцію, ітеративно оновлюючи параметри на основі напрямку градієнта.
Завдяки ітераційній природі алгоритму він може обробляти простори великої розмірності та складні функції, що робить його незамінним у машинному навчанні та обробці даних.
Градієнтний спуск може легко долати реальні труднощі та значно сприяти розвитку технологій і прийняття рішень на основі даних завдяки ретельному вибору швидкості навчання та застосуванню розширених варіацій, таких як стохастичний градієнтний спуск і Адам.




залишити коментар