Talaan ng nilalaman[Tago][Ipakita]
Ano ang pumapasok sa isip mo kapag narinig mo ang salitang "robotics"? Karamihan sa mga tao ay naglalarawan ng isang metal na makina na tumatakbo sa kuryente. Bagama't maraming pag-unlad ang ginagawa upang makamit ang mga uri ng mga robot na karaniwang nakikita sa science fiction, may isa pang sangay ng robotics na maaaring ikagulat mo.
Sa huling ilang taon, tumaas ang interes sa soft-bodied robotics. Ang mga uri ng mga robot ay maaaring makamit sa iba't ibang paraan. Gayunpaman, ang karaniwang tema ay ang paggamit ng mga elastic na materyales upang lumikha ng mga robot na parehong ligtas at madaling ibagay sa iba't ibang konteksto.
Ang mga tradisyunal na robot na matigas ang katawan, tulad ng kung ano ang maaari mong makita sa isang semi-automated na pabrika, ay kadalasang hindi angkop para sa ilang partikular na kapaligiran. Ang mga uri ng robot na ito ay karaniwang umaasa sa mga tumpak na paggalaw at algorithm upang maiwasan ang mga banggaan. Ang materyal na ginamit ay maaari ring gawin itong mapanganib kapag ginamit sa malapit sa mga tao.
Maraming research lab sa buong mundo na sumusubok na lumikha ng perpektong soft-bodies robot.
Sa blog na ito, titingnan natin ang kamakailang pag-unlad mula sa Chinese University of Hong Kong – ang tinatawag na magnetic slime robot. Tuklasin din namin ang mga praktikal na aplikasyon ng bagong teknolohiya at ang mga kasalukuyang limitasyon nito.
Ano ang Soft Robotics?
Ang malambot na robotics ay isang subfield ng robotics na naglalayong magdisenyo at bumuo ng mga robot na binubuo ng mga sumusunod na materyales.
Ano ang ibig nating sabihin ng sumusunod? Ang terminong "sumusunod" sa mechanical engineering ay tumutukoy sa isang uri ng mekanismo na nakakamit ng paggalaw sa pamamagitan ng elastic deformation. Kabaligtaran ito sa mga tipikal na matibay na katawan na maaari mong makita sa mga kasalukuyang robot.
Bagama't maraming matibay na katawan na mga robot ang gumagamit ng malalambot na bahagi sa madiskarteng paraan, ang pananaliksik sa malambot na robotics sa pangkalahatan ay naglalayong para sa isang ganap na malambot na makina.
Maaaring nagtataka ka kung paano gagalaw ang isang malambot na robot. Kinailangan ng mga mananaliksik na gumawa ng mga bagong paraan upang makontrol ang malambot na mga robot nang walang metal na frame na karaniwan sa maraming matibay na mga robot.
Ang ilang mga mananaliksik ay gumagamit ng electrostatic force upang baguhin ang hugis ng mga materyales. Ang iba pang malambot na robot ay gumagamit ng mga espesyal na polimer na maaaring magbago ng hugis kapag ang init ay ipinakilala sa materyal. Maaalala ng mga materyales na ito ang kanilang orihinal na hugis kahit na pagkatapos ng maraming pagbabago sa temperatura.
Paggamit ng Magnetic Actuation
Ang mga mananaliksik ay tumingin din sa paglikha ng malambot na mga robot na magnetically actuated. Ang mga mananaliksik mula sa Chinese University of Hong Kong ay nangunguna sa a bagong anyo ng malambot na katawan na mga robot na gumagamit ng mga magnet upang kontrolin ang isang non-Newtonian fluid-based na "slime" na robot.
Sinubukan ng mga mananaliksik na gumamit ng ibang uri ng materyal mula sa nakaraang pananaliksik sa magnetic soft-bodied robot.
Ang naunang pananaliksik ay gumamit ng silicone o ferrofluid na dumating sa kanilang mga limitasyon. Ang mga Elastomer-based o silicone soft robot ay may limitadong deformability habang ang ferrofluid ay itinuring na masyadong hindi matatag para sa maraming mga kaso ng paggamit.
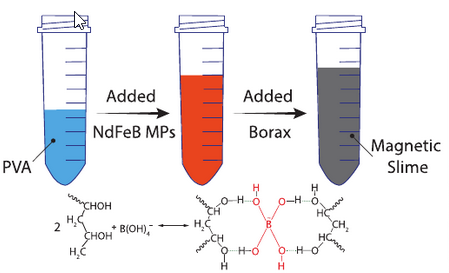
Ang mga mananaliksik sa Hong Kong ay lumikha ng putik na gawa sa pinaghalong polyvinyl alcohol (PVA) at borax. Hinahalo sa likido ang maliliit na magnetic particle na nagpapahintulot sa mga mananaliksik na manipulahin ang likido gamit ang isang magnetic field.

Ang non-Newtonian fluid ay mayroong self-healing properties na nagpapahintulot sa robot na kumonekta sa iba pang magkakahiwalay na bahagi at pagsamahin sa isang buo.
Mga Aplikasyon at Limitasyon
Ang kakayahan ng robot na mag-navigate sa mga makitid na channel ay humantong sa ilang posibleng mga aplikasyon sa larangan ng pangangalagang pangkalusugan.
Halimbawa, ang slime robot ay maaaring kainin ng isang tao at gamitin upang kunin ang mga mapaminsalang bagay nang hindi gumagamit ng operasyon.
Ipinakita rin ng mga mananaliksik sa kanilang papel na ang fluid na ginamit ay conductive din. Nangangahulugan ito na ang magnetic slime ay maaaring kumilos bilang isang circuit switch at posibleng bilang isang paraan ng pag-aayos ng sirang circuitry.
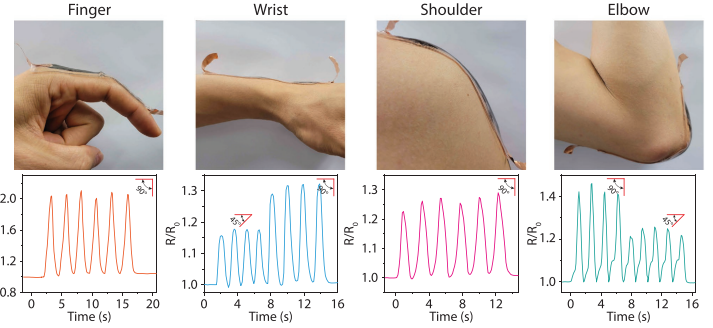
Ang magnetic slime ay maaaring kumilos bilang isang motion sensor na maaaring umangkop sa baluktot at dynamic na mekanikal na kapaligiran.
Bagama't nangangako, lahat ng mga application na ito ay mga panukala pa rin sa pinakamahusay at higit pang pananaliksik ang kailangang gawin upang higit pang mapabuti ang pagganap ng slime robot.
Napansin ng mga mananaliksik na ang putik mismo ay nakakalason at kasalukuyang hindi angkop para gamitin sa katawan ng tao. Ang mga magnetic particle na kumokontrol sa slime ay ginagawang nakakalason ang slime robot. Ang mga mananaliksik ay kailangang magdagdag ng isang layer ng silica coating upang gawing ligtas na gamitin ang putik.
Konklusyon
Ang larangan ng malambot na robotics ay medyo bago pa rin, ngunit nagpapakita na ng maraming pangako. Ang potensyal na paggamit ng malambot na katawan na mga robot sa mga medikal at surgical na aplikasyon ay maaaring humantong sa mas maraming buhay na nailigtas. Ang ideya ng mga naisusuot na malambot na robot ay maaaring makatulong sa mga taong may mga kapansanan.
Namangha pa ako na nagsimula na ang mga siyentipiko ng NASA magbuo malambot ang katawan na mga robot upang tulungan ang mga astronaut na manatiling ligtas sa panahon ng orbit.
Sana, mas maraming pananaliksik ang magbubukas ng buong potensyal ng soft-bodied robotics sa isang mundo kung saan ang mga tao ay naglagay ng higit at higit na tiwala sa mga makina.
Ano sa palagay mo ang hinaharap ng malambot na robotics?



Mag-iwan ng Sagot