Innehållsförteckning[Dölj][Visa]
Vad tänker du på när du hör ordet "robotik"? De flesta skulle föreställa sig en metallisk maskin som går på elektricitet. Medan många framsteg görs för att uppnå de typer av robotar som vanligtvis ses inom science fiction, finns det en annan gren av robotik som kan överraska dig.
De senaste åren har intresset för mjukkroppar robotik ökat. Dessa typer av robotar kan åstadkommas på olika sätt. Det gemensamma temat är dock användningen av elastiska material för att skapa robotar som är både säkra och anpassningsbara i en mängd olika sammanhang.
Traditionella robotar med stel kropp, som det du kan hitta i en halvautomatiserad fabrik, är ofta inte väl lämpade för vissa miljöer. Dessa typer av robotar förlitar sig vanligtvis på exakta rörelser och algoritmer för att förhindra kollisioner. Materialet som används kan också göra det farligt när det används i närheten av människor.
Det finns många forskningslabb över hela världen som försöker skapa den perfekta roboten för mjuka kroppar.
I den här bloggen ska vi ta en titt på en ny utveckling från det kinesiska universitetet i Hong Kong – den så kallade magnetiska slemroboten. Vi kommer också att utforska de praktiska tillämpningarna av den nya tekniken och dess nuvarande begränsningar.
Vad är Soft Robotics?
Mjuk robotik är ett underområde av robotik som syftar till att designa och utveckla robotar som är sammansatta av kompatibla material.
Vad menar vi med compliant? Termen "kompatibel" inom maskinteknik hänvisar till en typ av mekanism som uppnår rörelse genom elastisk deformation. Detta är i motsats till de typiska stela kroppar som du kan se i nuvarande robotar.
Medan många robotar med stel kropp använder mjuka komponenter strategiskt, syftar forskning inom mjuk robotik i allmänhet till en helt mjuk maskin.
Du kanske undrar hur en mjuk robot skulle röra sig. Forskare var tvungna att ta fram nya sätt att styra mjuka robotar utan den metallram som är vanlig i många stela robotar.
Vissa forskare använder elektrostatisk kraft för att ändra formen på material. Andra mjuka robotar använder speciella polymerer som kan ändra form när värme förs in i materialet. Dessa material kommer ihåg sin ursprungliga form även efter många temperaturförändringar.
Använder magnetisk aktivering
Forskare har också tittat på att skapa mjuka robotar som aktiveras magnetiskt. Forskare från det kinesiska universitetet i Hong Kong är banbrytande ny form av mjukkroppsrobotar som använder magneter för att styra en icke-Newtonsk vätskebaserad "slem"-robot.
Forskarna försökte använda en annan typ av material från tidigare forskning på magnetiska mjukkroppar.
Tidigare forskning använde silikon eller ferrofluid som kom med sina begränsningar. Elastomerbaserade eller mjuka silikonrobotar hade begränsad deformerbarhet medan ferrofluid ansågs vara för instabil för många användningsfall.
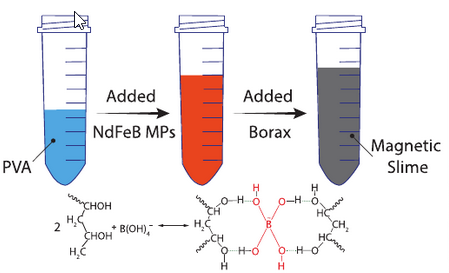
Forskarna i Hongkong skapade ett slem gjort av en blandning av polyvinylalkohol (PVA) och borax. Blandade i vätskan finns små magnetiska partiklar som gjorde det möjligt för forskarna att manipulera vätskan med hjälp av ett magnetfält.

Den icke-newtonska vätskan hade självläkande egenskaper som gjorde att roboten kunde ansluta till andra separata delar och kombineras till en helhet.
Applikationer och begränsningar
Robotens förmåga att navigera genom smala kanaler har lett till några ev tillämpningar inom hälso- och sjukvårdsområdet.
Till exempel kan slemroboten intas av en människa och användas för att extrahera skadliga föremål utan användning av kirurgi.
Forskarna har också visat i sin uppsats att vätskan som används också är ledande. Detta innebär att det magnetiska slemmet kan fungera som en kretsbrytare och möjligen som ett sätt att reparera skadade kretsar.
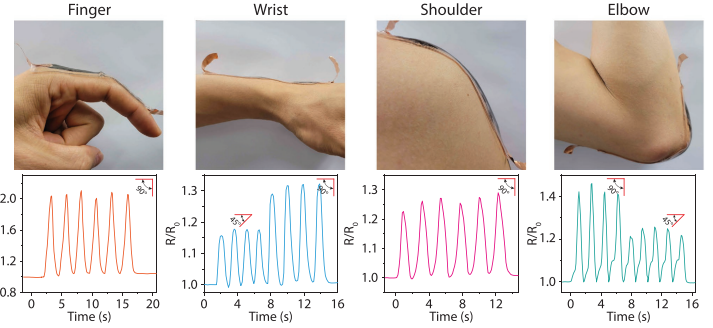
Det magnetiska slemmet skulle kunna fungera som en rörelsesensor som kan anpassa sig till böjning och dynamiska mekaniska miljöer.
Även om de är lovande är alla dessa applikationer fortfarande i bästa fall förslag och mer forskning kommer att behöva göras för att ytterligare förbättra slimerobotens prestanda.
Forskarna har noterat att slemmet i sig är giftigt och för närvarande inte lämpligt för användning i människokroppen. De magnetiska partiklarna som styr slemmet gör slemroboten giftig. Forskarna behövde lägga till ett lager av kiseldioxidbeläggning för att göra slemmet säkert att använda.
Slutsats
Området för mjuk robotik är fortfarande relativt nytt, men visar redan mycket lovande. Den potentiella användningen av robotar med mjuk kropp i medicinska och kirurgiska tillämpningar kan leda till att fler liv räddas. Idén med bärbara mjuka robotar skulle potentiellt kunna hjälpa människor med funktionsnedsättningar.
Jag blev till och med förvånad över att NASA-forskare har börjat göra det utveckla robotar med mjuk kropp som hjälper astronauter att hålla sig säkra under omloppsbana.
Förhoppningsvis kommer mer forskning att låsa upp den fulla potentialen hos mjukkroppsrobotik i en värld där människor har litat mer och mer på maskiner.
Vad tror du om framtiden för mjuk robotik?



Kommentera uppropet