Spis treści[Ukryć][Pokazać]
Co przychodzi ci na myśl, gdy słyszysz słowo „robotyka”? Większość ludzi wyobraża sobie metalową maszynę zasilaną energią elektryczną. Chociaż poczyniono wiele postępów, aby osiągnąć typy robotów powszechnie spotykane w science fiction, istnieje inna gałąź robotyki, która może Cię zaskoczyć.
W ciągu ostatnich kilku lat wzrosło zainteresowanie robotyką o miękkich ciałach. Tego typu roboty można osiągnąć na różne sposoby. Jednak wspólnym tematem jest wykorzystanie elastycznych materiałów do tworzenia robotów, które są zarówno bezpieczne, jak i adaptowalne w różnych kontekstach.
Tradycyjne roboty o sztywnym korpusie, takie jak te, które można znaleźć w półautomatycznej fabryce, często nie nadają się do pewnych środowisk. Tego typu roboty zwykle opierają się na precyzyjnych ruchach i algorytmach, aby zapobiegać kolizjom. Zastosowany materiał może również sprawić, że będzie niebezpieczny, gdy będzie używany w pobliżu ludzi.
Na całym świecie istnieje wiele laboratoriów badawczych, które próbują stworzyć idealnego robota z miękkimi ciałami.
W tym blogu przyjrzymy się najnowszemu rozwojowi Chińskiego Uniwersytetu w Hongkongu – tak zwanemu magnetycznemu robotowi śluzowemu. Zbadamy również praktyczne zastosowania nowej technologii i jej obecne ograniczenia.
Czym jest miękka robotyka?
Robotyka miękka to poddziedzina robotyki, której celem jest projektowanie i opracowywanie robotów składających się z materiałów zgodnych z wymaganiami.
Co rozumiemy przez zgodność? Termin „podatny” w inżynierii mechanicznej odnosi się do rodzaju mechanizmu, który uzyskuje ruch poprzez elastyczne odkształcenie. Jest to w przeciwieństwie do typowych sztywnych ciał, które można zobaczyć w obecnych robotach.
Podczas gdy wiele robotów o sztywnym korpusie strategicznie wykorzystuje miękkie komponenty, badania nad robotyką miękką mają na celu stworzenie w pełni miękkiej maszyny.
Być może zastanawiasz się, jak poruszałby się miękki robot. Badacze musieli opracować nowe sposoby sterowania miękkimi robotami bez metalowej ramy, która jest powszechnie stosowana w wielu sztywnych robotach.
Niektórzy badacze wykorzystują siłę elektrostatyczną do zmiany kształtu materiałów. Inne roboty miękkie wykorzystują specjalne polimery, które mogą zmieniać kształt po wprowadzeniu ciepła do materiału. Materiały te zapamiętują swój pierwotny kształt nawet po wielu zmianach temperatury.
Korzystanie z aktywacji magnetycznej
Badacze przyjrzeli się również stworzeniu miękkich robotów, które są uruchamiane magnetycznie. Naukowcy z Chińskiego Uniwersytetu w Hongkongu są pionierami w nowa forma robotów o miękkim ciele które wykorzystują magnesy do sterowania nienewtonowskim robotem „szlamowym” na bazie płynów.
Naukowcy próbowali użyć innego rodzaju materiału niż w poprzednich badaniach nad robotami magnetycznymi z miękkim korpusem.
Wcześniejsze badania wykorzystywały silikon lub ferrofluid, który przyszedł z ich ograniczeniami. Roboty na bazie elastomeru lub miękkie silikonowe miały ograniczoną odkształcalność, podczas gdy ferrofluid uznano za zbyt niestabilny w wielu przypadkach zastosowania.
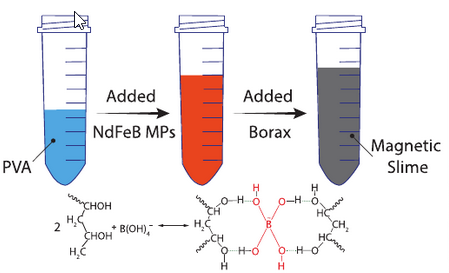
Naukowcy z Hongkongu stworzyli szlam z mieszaniny polialkoholu winylowego (PVA) i boraksu. W płynie zmieszane są maleńkie cząstki magnetyczne, które umożliwiły naukowcom manipulowanie płynem za pomocą pola magnetycznego.

Płyn nienewtonowski miał właściwości samoleczenia, które umożliwiały robotowi łączenie się z innymi oddzielnymi częściami i łączenie się w całość.
Zastosowania i ograniczenia
Zdolność robota do poruszania się po wąskich kanałach doprowadziła do pewnych możliwych zastosowania w dziedzinie ochrony zdrowia.
Na przykład szlamowy robot mógłby zostać połknięty przez człowieka i wykorzystany do wydobycia szkodliwych przedmiotów bez użycia operacji.
Naukowcy wykazali również w swoim artykule, że użyty płyn jest również przewodzący. Oznacza to, że szlam magnetyczny może działać jako przełącznik obwodu i prawdopodobnie jako środek do naprawy uszkodzonych obwodów.
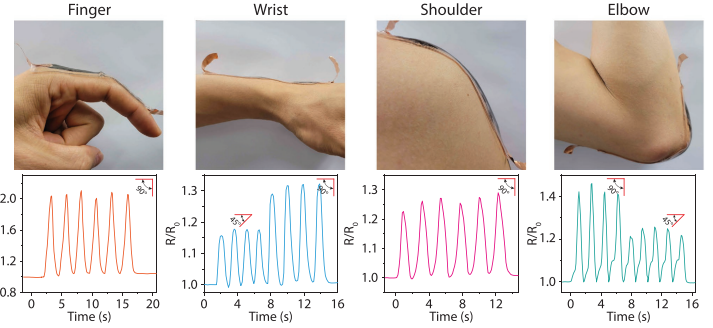
Szlam magnetyczny może działać jako czujnik ruchu, który może dostosowywać się do zginania i dynamicznych środowisk mechanicznych.
Choć obiecujące, wszystkie te zastosowania są w najlepszym razie propozycjami i trzeba będzie przeprowadzić więcej badań, aby jeszcze bardziej poprawić wydajność robota śluzu.
Naukowcy zauważyli, że sam śluz jest toksyczny i obecnie nie nadaje się do stosowania w ludzkim ciele. Cząsteczki magnetyczne, które kontrolują śluz, sprawiają, że śluzowy robot jest toksyczny. Naukowcy musieli dodać warstwę powłoki krzemionkowej, aby szlam był bezpieczny w użyciu.
Wnioski
Dziedzina robotyki miękkiej jest wciąż stosunkowo nowa, ale już pokazuje wiele obiecujących. Potencjalne wykorzystanie robotów o miękkich korpusach w zastosowaniach medycznych i chirurgicznych może prowadzić do większej liczby uratowanych istnień ludzkich. Pomysł miękkich robotów do noszenia może potencjalnie pomóc osobom niepełnosprawnym.
Byłem nawet zdumiony, że naukowcy NASA zaczęli rozwijać roboty o miękkim ciele, które pomagają astronautom zachować bezpieczeństwo podczas orbity.
Mamy nadzieję, że więcej badań odblokuje pełny potencjał robotyki o miękkich ciałach w świecie, w którym ludzie coraz bardziej ufają maszynom.
Co myślisz o przyszłości miękkiej robotyki?



Dodaj komentarz