X’jiġi f’moħħok meta tisma’ l-kelma “robotika”? Ħafna nies kienu jpinġu magna metallika li taħdem bl-elettriku. Filwaqt li qed isiru ħafna avvanzi biex jinkisbu t-tipi ta 'robots li jidhru komunement fil-fantaxjenza, hemm fergħa oħra tar-robotika li tista' tissorprendik.
L-aħħar ftit snin raw żieda fl-interess fir-robotika soft-bodied. Dawn it-tipi ta 'robots jistgħu jinkisbu b'modi differenti. Madankollu, it-tema komuni hija l-użu ta 'materjali elastiċi biex jinħolqu robots li huma kemm sikuri kif ukoll adattabbli f'varjetà ta' kuntesti.
Robots tradizzjonali b'korp riġidu, bħal dak li tista 'ssib f'fabbrika semi-awtomatizzata, ħafna drabi mhumiex adattati tajjeb għal ċerti ambjenti. Dawn it-tipi ta 'robots normalment jiddependu fuq movimenti u algoritmi preċiżi biex jipprevjenu l-ħabtiet. Il-materjal użat jista' wkoll jagħmilha perikoluża meta jintuża qrib il-bnedmin.
Hemm ħafna laboratorji ta 'riċerka madwar id-dinja li qed jippruvaw joħolqu r-robot ideali ta' korpi rotob.
F'dan il-blog, se nagħtu ħarsa lejn żvilupp reċenti mill-Università Ċiniża ta' Ħong Kong – l-hekk imsejjaħ robot tal-ħama manjetiku. Aħna ser nesploraw ukoll l-applikazzjonijiet prattiċi tat-teknoloġija l-ġdida u l-limitazzjonijiet attwali tagħha.
X'inhi Soft Robotics?
Ir-robotika artab hija subqasam tar-robotika li timmira li tiddisinja u tiżviluppa robots li huma komposti minn materjali konformi.
X'nifhmu bi konformi? It-terminu "konformi" fl-inġinerija mekkanika jirreferi għal tip ta 'mekkaniżmu li jikseb moviment permezz ta' deformazzjoni elastika. Dan huwa b'kuntrast mal-korpi riġidi tipiċi li tista 'tara fir-robots attwali.
Filwaqt li ħafna robots b'ġisem riġidu jużaw komponenti rotob strateġikament, ir-riċerka fir-robotika artab ġeneralment timmira għal magna kompletament artab.
Inti tista 'tistaqsi kif robot artab se jiċċaqlaq. Ir-riċerkaturi kellhom ifasslu modi ġodda biex jikkontrollaw robots rotob mingħajr il-qafas tal-metall komuni f'ħafna robots riġidi.
Xi riċerkaturi jużaw forza elettrostatika biex jibdlu l-forma tal-materjali. Robots rotob oħra jużaw polimeri speċjali li jistgħu jbiddlu l-forma meta s-sħana tiġi introdotta fil-materjal. Dawn il-materjali jiftakru l-forma oriġinali tagħhom anke wara ħafna bidliet fit-temperatura.
Bl-użu ta 'Attwazzjoni Manjetika
Ir-riċerkaturi ħarsu wkoll lejn il-ħolqien ta 'robots rotob li huma attwati b'mod manjetiku. Riċerkaturi mill-Università Ċiniża ta 'Hong Kong huma pijunier a forma ġdida ta 'robots artab li jużaw kalamiti biex jikkontrollaw robot "slime" ibbażat fuq fluwidu mhux Newtonjan.
Ir-riċerkaturi ppruvaw jużaw tip differenti ta 'materjal minn riċerka preċedenti fuq robots manjetiċi b'ġisem artab.
Riċerka preċedenti użat silikon jew ferrofluid li daħal bil-limitazzjonijiet tagħhom. Ir-robots rotob ibbażati fuq elastomeri jew tas-silikonju kellhom deformabbiltà limitata filwaqt li l-ferrofluid kien meqjus bħala instabbli wisq għal ħafna każijiet ta 'użu.
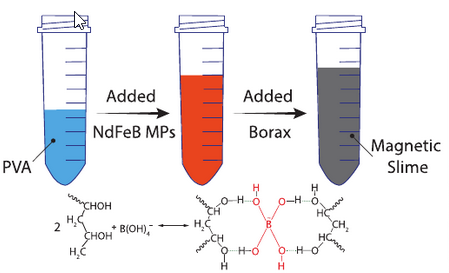
Ir-riċerkaturi ta 'Hong Kong ħolqu ħama magħmula minn taħlita ta' alkoħol tal-polivinil (PVA) u borax. Imħallta fil-fluwidu hemm partiċelli manjetiċi ċkejkna li ppermettew lir-riċerkaturi jimmanipulaw il-fluwidu bl-użu ta 'kamp manjetiku.

Il-fluwidu mhux Newtonjan kellu proprjetajiet li jfejjaq lilu nnifsu li ppermettew lir-robot jgħaqqad ma 'partijiet separati oħra u jingħaqad f'wieħed sħiħ.
Applikazzjonijiet u Limitazzjonijiet
Il-kapaċità tar-robot li jinnaviga permezz ta 'kanali dojoq wasslet għal xi possibbli applikazzjonijiet fil-qasam tal-kura tas-saħħa.
Pereżempju, ir-robot tal-ħama jista 'jiġi inġerit minn bniedem u jintuża biex jiġu estratti oġġetti ta' ħsara mingħajr l-użu ta 'kirurġija.
Ir-riċerkaturi wrew ukoll fid-dokument tagħhom li l-fluwidu użat huwa wkoll konduttiv. Dan ifisser li l-ħama manjetika tista 'taġixxi bħala swiċċ taċ-ċirkwit u possibilment bħala mezz ta' tiswija ta 'ċirkwiti bil-ħsara.
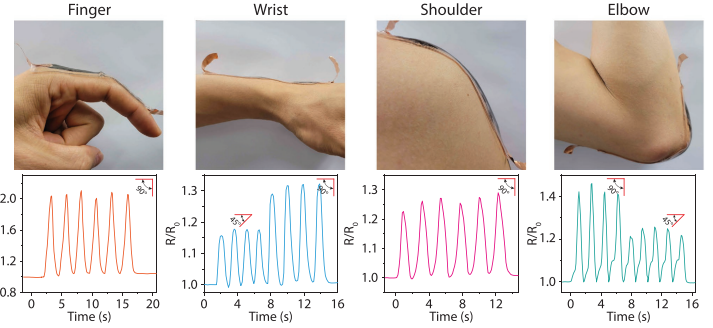
Il-ħama manjetika jista 'jaġixxi bħala sensor tal-moviment li jista' jadatta għal ambjenti mekkaniċi ta 'liwi u dinamiċi.
Filwaqt li jippromettu, dawn l-applikazzjonijiet kollha għadhom proposti fl-aħjar u se jkollha ssir aktar riċerka biex tkompli tittejjeb il-prestazzjoni tar-robot tal-ħama.
Ir-riċerkaturi nnutaw li l-ħama innifsu huwa tossiku u bħalissa mhux adattat għall-użu fil-ġisem tal-bniedem. Il-partiċelli manjetiċi li jikkontrollaw il-ħama jagħmlu r-robot tal-ħama tossiku. Ir-riċerkaturi kellhom bżonn iżidu saff ta 'kisi tas-silika biex jagħmlu l-ħama sikur biex jintuża.
konklużjoni
Il-qasam tar-robotika artab għadu relattivament ġdid, iżda diġà juri ħafna wegħda. L-użu potenzjali ta 'robots b'ġisem artab f'applikazzjonijiet mediċi u kirurġiċi jista' jwassal għal aktar ħajjiet salvati. L-idea ta’ robots rotob li jintlibsu tista’ potenzjalment tgħin lin-nies b’diżabilità.
Saħansitra kont mistagħġeb li x-xjentisti tan-NASA bdew jagħmlu jiżviluppaw robots b'ġisem artab biex jgħinu lill-astronawti jibqgħu sikuri waqt l-orbita.
Nisperaw, aktar riċerka se tiftaħ il-potenzjal sħiħ tar-robotika soft-bodied f'dinja fejn il-bnedmin poġġew aktar u aktar fiduċja fil-magni.
X'taħseb dwar il-futur tar-robotika artab?



Ħalli Irrispondi