Mēs saskaramies ar optimizācijas problēmām daudzos reālos apstākļos, kad mums ir jānosaka funkcijas minimums vai maksimums.
Uzskatiet, ka funkcija ir sistēmas matemātisks attēlojums, un tās minimuma vai maksimuma noteikšana var būt ļoti svarīga dažādām lietojumprogrammām, piemēram, mašīnmācībai, inženierzinātnēm, finansēm un citiem.
Apsveriet ainavu ar pakalniem un ielejām, un mūsu mērķis ir atrast zemāko punktu (minimumu), lai pēc iespējas ātrāk nokļūtu galamērķī.
Mēs bieži izmantojam gradienta nolaišanās algoritmus, lai atrisinātu šādas optimizācijas problēmas. Šie algoritmi ir iteratīvas optimizācijas metodes, lai minimizētu funkciju, veicot soļus stāvākās nolaišanās virzienā (negatīvs gradients).
Gradients atspoguļo virzienu ar visstraujāko funkcijas pieaugumu, un, braucot pretējā virzienā, mēs nonākam līdz minimumam.
Kas īsti ir gradienta nolaišanās algoritms?
Gradienta nolaišanās ir populāra iteratīva optimizācijas pieeja funkcijas minimuma (vai maksimuma) noteikšanai.
Tas ir būtisks instruments vairākās jomās, tostarp mašīna mācīšanās, dziļa mācīšanās, mākslīgais intelekts, inženierija un finanses.
Algoritma pamatprincips ir balstīts uz gradienta izmantošanu, kas parāda funkcijas vērtības straujākā pieauguma virzienu.
Algoritms efektīvi virza funkcijas ainavu uz minimumu, atkārtoti veicot darbības pretējā virzienā kā gradients, iteratīvi uzlabojot risinājumu līdz konverģencei.
Kāpēc mēs izmantojam gradienta nolaišanās algoritmus?
Iesācējiem tos var izmantot, lai atrisinātu dažādas optimizācijas problēmas, tostarp tās, kurās ir liela izmēra telpas un sarežģītas funkcijas.
Otrkārt, viņi var ātri atrast optimālus risinājumus, īpaši, ja analītiskais risinājums nav pieejams vai ir dārgs skaitļošanas ziņā.
Gradienta nolaišanās metodes ir ļoti mērogojamas un var veiksmīgi apstrādāt milzīgas datu kopas.
Tā rezultātā tos plaši izmanto mašīnmācīšanās algoritmi piemēram, neironu tīklu apmācība mācīties no datiem un modificēt to parametrus, lai samazinātu prognozēšanas kļūdas.
Detalizēts gradienta nolaišanās soļu piemērs
Apskatīsim detalizētāku piemēru, lai labāk izprastu gradienta nolaišanās tehniku.
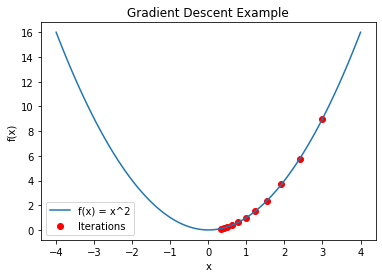
Aplūkosim 2D funkciju f(x) = x2, kas ģenerē pamata parabolisko līkni ar minimumu pie (0,0). Lai noteiktu šo minimālo punktu, tiks izmantots gradienta nolaišanās algoritms.
1. darbība: inicializācija
Gradienta nolaišanās algoritms sākas ar mainīgā x vērtības inicializāciju, kas attēlota kā x0.
Sākotnējai vērtībai var būt ievērojama ietekme uz algoritma veiktspēju.
Divas izplatītas metodes ir nejauša inicializācija vai iepriekšēju zināšanu izmantošana par problēmu. Pieņemsim, ka x₀ = 3 mūsu gadījuma sākumā.
2. darbība: aprēķiniet gradientu
Funkcijas f(x) gradients pašreizējā pozīcijā x₀. tad ir jāaprēķina.
Gradients norāda funkcijas slīpumu vai izmaiņu ātrumu konkrētajā pozīcijā.
Mēs aprēķinām atvasinājumu attiecībā uz x funkcijai f(x) = x2, kas nodrošina f'(x) = 2x. Mēs iegūstam gradientu pie x0 kā 2 * 3 = 6, gradienta aprēķinā aizstājot ar x₀ = 3.
3. darbība: atjauniniet parametrus
Izmantojot gradienta informāciju, mēs atjauninām x vērtību šādi: x = x₀ – α * f'(x₀), kur α (alfa) apzīmē mācīšanās ātrumu.
Mācīšanās ātrums ir hiperparametrs, kas nosaka katra atjaunināšanas procesa posma lielumu. Atbilstoša mācīšanās ātruma iestatīšana ir ļoti svarīga, jo lēns mācīšanās ātrums var izraisīt algoritms veikt pārāk daudz atkārtojumu, lai sasniegtu minimumu.
No otras puses, augsts mācīšanās līmenis var izraisīt algoritma atlēcienus vai nespēju konverģēt. Šī piemēra labad pieņemsim mācīšanās ātrumu α = 0.1.
4. darbība: atkārtojiet
Kad mums ir atjaunināta x vērtība, mēs atkārtojam 2. un 3. darbību iepriekš noteiktam iterāciju skaitam vai līdz x izmaiņas kļūst minimālas, norādot uz konverģenci.
Metode aprēķina gradientu, atjaunina x vērtību un turpina procedūru katrā iterācijā, ļaujot tai tuvoties minimumam.
5. solis: konverģence
Metode pēc dažām iterācijām saplūst līdz vietai, kur turpmākie atjauninājumi būtiski neietekmē funkcijas vērtību.
Mūsu gadījumā, iterācijām turpinoties, x tuvosies 0, kas ir f(x) = x^2 minimālā vērtība. Konverģencei nepieciešamo iterāciju skaitu nosaka tādi faktori kā izvēlētais mācīšanās ātrums un optimizējamās funkcijas sarežģītība.
Mācību līmeņa izvēle ()
Pieņemama mācīšanās ātruma () izvēle ir ļoti svarīga gradienta nolaišanās algoritma efektivitātei. Kā minēts iepriekš, zems mācīšanās ātrums var izraisīt lēnu konverģenci, savukārt augsts mācīšanās ātrums var izraisīt pārsniegumu un nespēju konverģenci.
Pareiza līdzsvara atrašana ir ļoti svarīga, lai nodrošinātu, ka algoritms pēc iespējas efektīvāk atbilst paredzētajam minimumam.
Mācību ātruma regulēšana praksē bieži ir izmēģinājumu un kļūdu procedūra. Pētnieki un praktiķi regulāri eksperimentē ar dažādiem mācīšanās ātrumiem, lai redzētu, kā tie ietekmē algoritma konverģenci viņu konkrētajā izaicinājumā.
Neizliektu funkciju apstrāde
Lai gan iepriekšējā piemērā bija vienkārša izliekta funkcija, daudzas reālās optimizācijas problēmas ir saistītas ar neizliektām funkcijām ar daudziem lokāliem minimumiem.
Šādos gadījumos izmantojot gradienta nolaišanos, metode var konverģēt uz lokālo minimumu, nevis uz globālo minimumu.
Lai pārvarētu šo problēmu, ir izstrādātas vairākas uzlabotas gradienta nolaišanās formas. Stohastiskā gradienta nolaišanās (SGD) ir viena no šādām metodēm, kas ievieš nejaušību, izvēloties nejaušu datu punktu apakškopu (pazīstamu kā mini partiju), lai aprēķinātu gradientu katrā iterācijā.
Šī izlases veida izlase ļauj algoritmam izvairīties no lokāliem minimumiem un izpētīt jaunas funkcijas reljefa daļas, palielinot iespējas atklāt labāku minimumu.
Adam (Adaptive Moment Estimation) ir vēl viena ievērojama variācija, kas ir adaptīva mācīšanās ātruma optimizācijas pieeja, kas ietver gan RMSprop, gan impulsa priekšrocības.
Ādams maina katra parametra mācīšanās ātrumu dinamiski, pamatojoties uz iepriekšējo gradienta informāciju, kas var nodrošināt labāku neizliektu funkciju konverģenci.
Šīs izsmalcinātās gradienta nolaišanās variācijas ir izrādījušās efektīvas arvien sarežģītāku funkciju apstrādē un kļuvušas par standarta rīkiem mašīnmācībā un dziļajā mācībā, kur bieži sastopamas neizliektas optimizācijas problēmas.
6. darbība. Vizualizējiet savu progresu
Apskatīsim gradienta nolaišanās algoritma gaitu, lai labāk izprastu tā iteratīvo procesu. Aplūkosim grafiku ar x asi, kas attēlo iterācijas, un y asi, kas attēlo funkcijas f(x) vērtību.
Algoritmam atkārtojot, x vērtība tuvojas nullei, un rezultātā funkcijas vērtība samazinās ar katru soli. Uzzīmējot grafikā, tam būtu izteikta samazināšanās tendence, kas atspoguļotu algoritma virzību uz minimuma sasniegšanu.
7. darbība. Mācību ātruma precizēšana
Mācīšanās ātrums () ir svarīgs algoritma veiktspējas faktors. Praksē ideālā mācīšanās ātruma noteikšanai bieži ir nepieciešams izmēģinājums un kļūda.
Dažas optimizācijas metodes, piemēram, mācīšanās ātruma grafiki, apmācības laikā var dinamiski mainīt mācīšanās ātrumu, sākot ar lielāku vērtību un pakāpeniski to samazinot, algoritmam tuvojoties konverģencei.
Šī metode palīdz atrast līdzsvaru starp strauju attīstību sākumā un stabilitāti optimizācijas procesa beigās.
Vēl viens piemērs: kvadrātiskās funkcijas samazināšana
Apskatīsim citu piemēru, lai labāk izprastu gradienta nolaišanos.
Aplūkosim divdimensiju kvadrātisko funkciju g(x) = (x – 5)^2. Ja x = 5, šai funkcijai ir arī minimums. Lai atrastu šo minimumu, mēs izmantosim gradienta nolaišanos.
1. Inicializācija: sāksim ar x0 = 8 kā sākumpunktu.
2. Aprēķiniet g(x) gradientu: g'(x) = 2(x – 5). Ja mēs aizstājam ar x0 = 8, gradients pie x0 ir 2 * (8–5) = 6.
3. Ar = 0.2 kā mūsu mācīšanās ātrumu mēs atjauninām x šādi: x = x₀ – α * g'(x₀) = 8 – 0.2 * 6 = 6.8.
4. Atkārtojiet: mēs atkārtojam 2. un 3. darbību tik reižu, cik nepieciešams, līdz tiek sasniegta konverģence. Katrs cikls tuvina x 5, minimālā vērtība g(x) = (x – 5)2.
5. Konverģence. Metode galu galā konverģē uz x = 5, kas ir minimālā vērtība g(x) = (x – 5)2.
Mācību rādītāju salīdzinājums
Salīdzināsim gradienta nolaišanās konverģences ātrumu dažādiem mācīšanās ātrumiem, piemēram, α = 0.1, α = 0.2 un α = 0.5 mūsu jaunajā piemērā. Mēs redzam, ka zemāks mācīšanās līmenis (piemēram, = 0.1) radīs ilgāku konverģenci, bet precīzāku minimumu.
Augstāks mācīšanās ātrums (piem., = 0.5) saplūst ātrāk, bet var pārsniegt minimālo līmeni vai svārstīties, kā rezultātā precizitāte būs sliktāka.
Multimodāls neizliektu funkciju apstrādes piemērs
Apsveriet h(x) = sin(x) + 0.5x, neizliektu funkciju.
Šai funkcijai ir vairāki vietējie minimumi un maksimumi. Atkarībā no sākuma pozīcijas un mācīšanās ātruma mēs varētu pietuvoties jebkuram no vietējiem minimumiem, izmantojot standarta gradienta nolaišanos.
Mēs to varam atrisināt, izmantojot uzlabotas optimizācijas metodes, piemēram, Adam vai stohastiskā gradienta nolaišanās (SGD). Šīs metodes izmanto adaptīvus mācīšanās ātrumus vai nejaušu izlasi, lai izpētītu dažādus funkcijas ainavas reģionus, palielinot iespēju sasniegt labāku minimumu.
Secinājumi
Gradienta nolaišanās algoritmi ir spēcīgi optimizācijas rīki, kas tiek plaši izmantoti dažādās nozarēs. Viņi atklāj zemāko (vai maksimālo) funkciju, iteratīvi atjauninot parametrus, pamatojoties uz gradienta virzienu.
Algoritma iteratīvā rakstura dēļ tas var apstrādāt augstas dimensijas telpas un sarežģītas funkcijas, padarot to par neaizstājamu mašīnmācībā un datu apstrādē.
Gradienta nolaišanās var viegli pārvarēt reālās pasaules grūtības un ievērojami veicināt tehnoloģiju izaugsmi un uz datiem balstītu lēmumu pieņemšanu, rūpīgi izvēloties mācīšanās ātrumu un piemērojot uzlabotas variācijas, piemēram, stohastisko gradienta nolaišanos un Ādamu.




Atstāj atbildi