Inhaltsverzeechnes[Verstoppen][Show]
Wat kënnt am Kapp wann Dir d'Wuert "Robotik" héiert? Déi meescht Leit géifen eng metallesch Maschinn virstellen, déi op Elektrizitéit leeft. Wärend vill Fortschrëtter gemaach gi fir d'Zorte vu Roboter z'erreechen, déi allgemeng an der Science Fiction gesi ginn, gëtt et eng aner Branche vun der Robotik déi Iech iwwerrasche kéint.
Déi lescht Joren hunn e Steigerung vum Interesse fir mëll-kierper Robotik gesinn. Dës Aarte vu Robotere kënnen op verschidde Manéieren erreecht ginn. Wéi och ëmmer, dat gemeinsamt Thema ass d'Benotzung vun elastesche Materialien fir Roboteren ze kreéieren déi souwuel sécher an adaptéierbar sinn a verschiddene Kontexter.
Traditionell steiwe-kierperlech Roboteren, wéi dat wat Dir an enger semi-automatiséierter Fabréck fannt, sinn dacks net gutt gëeegent fir bestëmmten Ëmfeld. Dës Aarte vu Roboter vertrauen normalerweis op präzis Bewegungen an Algorithmen fir Kollisiounen ze vermeiden. D'Material benotzt kann et och geféierlech maachen wann se an der Noperschaft vu Mënschen benotzt ginn.
Et gi vill Fuerschungslaboratoiren weltwäit déi probéieren den ideale mëlle Kierper Roboter ze kreéieren.
An dësem Blog kucke mir eng rezent Entwécklung vun der Chinesescher Universitéit vun Hong Kong - de sougenannte magnetesche Schläimroboter. Mir wäerten och déi praktesch Uwendunge vun der neier Technologie an hir aktuell Aschränkungen entdecken.
Wat ass Soft Robotik?
Soft Robotik ass en Ënnerfeld vun der Robotik dat zielt Roboter ze designen an z'entwéckelen déi aus konforme Materialien zesummegesat sinn.
Wat menge mir mat konform? De Begrëff "kompatibel" am mechanesche Ingenieur bezitt sech op eng Aart vu Mechanismus déi Bewegung duerch elastesch Deformatioun erreecht. Dëst ass am Géigesaz zu den typesche steife Kierper, déi Dir an aktuelle Roboteren gesitt.
Wärend vill steife Roboter mëll Komponenten strategesch benotzen, zielt d'Fuerschung an der mëller Robotik allgemeng op eng voll mëll Maschinn.
Dir kënnt Iech froe wéi e mëlle Roboter géif bewegen. D'Fuerscher hu missen nei Weeër virstellen fir mëll Roboteren ze kontrolléieren ouni de Metallrahmen, deen a ville steife Roboteren allgemeng ass.
E puer Fuerscher benotzen elektrostatesch Kraaft fir d'Form vu Materialien z'änneren. Aner mëll Roboteren benotzen speziell Polymere déi d'Form änneren kënnen wann d'Hëtzt an d'Material agefouert gëtt. Dës Materialien erënneren hir ursprénglech Form och no villen Temperaturännerungen.
Benotzt Magnéitesch Aktuatioun
D'Fuerscher hunn och gekuckt fir mëll Roboter ze kreéieren déi magnetesch aktivéiert ginn. Fuerscher vun der Chinesesch Universitéit vun Hong Kong sinn Pionéier a nei Form vu mëll-bodied Roboteren déi Magnete benotzen fir en net-Newtonesche Flëssegbaséierten "Slime" Roboter ze kontrolléieren.
D'Fuerscher hu probéiert eng aner Zort vu Material aus der fréierer Fuerschung iwwer magnetesche mëlle Roboter ze benotzen.
Virdrun Fuerschung benotzt Silikon oder Ferrofluid déi koumen mat hiren Aschränkungen. Elastomer-baséiert oder Silikon mëll Roboteren haten limitéiert Deformabilitéit wärend Ferrofluid fir vill Benotzungsfäll ze onbestänneg ugesi gouf.
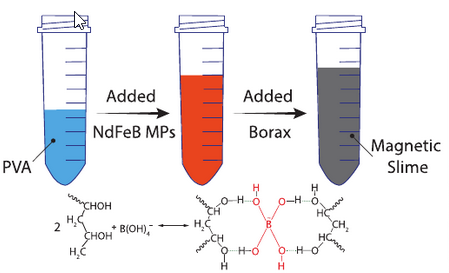
D'Hong Kong Fuerscher hunn e Schläim gemaach aus enger Mëschung aus Polyvinyl Alkohol (PVA) a Borax. Gemëscht an der Flëssegkeet si kleng magnetesch Partikelen, déi d'Fuerscher erlaabt hunn d'Flëssegkeet mat engem Magnéitfeld ze manipuléieren.

Déi net-Newtonesch Flëssegkeet hat selbstheilende Eegeschaften, déi de Roboter erlaabt hunn mat aneren getrennten Deeler ze verbannen an an e Ganzt ze kombinéieren.
Uwendungen a Aschränkungen
Dem Roboter seng Fäegkeet fir duerch schmuel Kanäl ze navigéieren huet zu e puer méiglech gefouert Uwendungen am Beräich vun der Gesondheetsariichtung.
Zum Beispill, de Schleimroboter kéint vun engem Mënsch ageholl ginn a benotzt gi fir schiedlech Objeten ouni Operatioun ze extrahieren.
D'Fuerscher hunn och an hirem Pabeier gewisen datt d'Flëssegkeet déi benotzt gëtt och konduktiv ass. Dëst bedeit datt de magnetesche Schläim als Circuitschalter a méiglecherweis als Mëttel fir beschiedegt Circuit ze reparéieren kann.
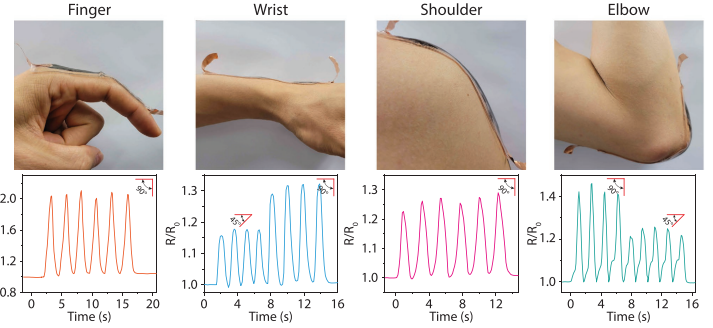
De magnetesche Schläim kéint als Bewegungssensor handelen, dee sech un d'Biege an dynamesch mechanesch Ëmfeld upassen kann.
Wärend verspriechend, sinn all dës Uwendungen nach ëmmer am beschten Virschléi a méi Fuerschung musse gemaach ginn fir d'Leeschtung vum Schleimroboter weider ze verbesseren.
D'Fuerscher hunn festgestallt datt de Schläim selwer gëfteg ass an de Moment net gëeegent ass fir am mënschleche Kierper ze benotzen. Déi magnetesch Partikelen, déi de Schläim kontrolléieren, maachen de Schläimroboter gëfteg. D'Fuerscher mussen eng Schicht Silica-Beschichtung addéieren fir de Schleim sécher ze benotzen.
Konklusioun
De Beräich vun der Soft Robotik ass nach relativ nei, awer weist scho vill Verspriechen. Déi potenziell Notzung vu mëlle Kierper Roboteren a medizineschen a chirurgeschen Uwendungen kéint zu méi Liewen gerett ginn. D'Iddi vu tragbare mëlle Robotere kéint potenziell Leit mat Behënnerungen hëllefen.
Ech war souguer iwwerrascht datt d'NASA Wëssenschaftler ugefaang hunn entwéckelen mëll-kierperlech Roboteren fir Astronauten ze hëllefen sécher während der Ëmlafbunn ze bleiwen.
Hoffentlech wäert méi Fuerschung dat vollt Potenzial vun der mëller kierper Robotik opmaachen an enger Welt wou d'Mënschen ëmmer méi Vertrauen a Maschinnen gesat hunn.
Wat mengt Dir iwwer d'Zukunft vun der Soft Robotik?



Hannerlooss eng Äntwert