ಪರಿವಿಡಿ[ಮರೆಮಾಡಿ][ತೋರಿಸಿ]
- ಮಾನವ-ರೋಬೋಟ್ ಪರಸ್ಪರ ಕ್ರಿಯೆ ನಿಖರವಾಗಿ ಏನು?
- ಮಾನವ-ರೋಬೋಟ್ ಪರಸ್ಪರ ಕ್ರಿಯೆಯನ್ನು ಹೇಗೆ ಸಾಧಿಸಬಹುದು?
- ಮಾನವ-ರೋಬೋಟ್ ಸಂವಹನದ ಬಗ್ಗೆ ನಾವು ಏಕೆ ಕಾಳಜಿ ವಹಿಸುತ್ತೇವೆ?
- ಮಾನವ-ರೋಬೋಟ್ ಪರಸ್ಪರ ಕ್ರಿಯೆಯ ಸಾಮರ್ಥ್ಯ
- ಹಿನ್ನೆಲೆ
- ಮಾನವ-ರೋಬೋಟ್ ಸಂವಹನಕ್ಕಾಗಿ ವಿನ್ಯಾಸಗಳು
- ಮಾನವರು-ರೋಬೋಟ್ಗಳ ಪರಸ್ಪರ ಕ್ರಿಯೆಯ ಮೇಲೆ ಪರಿಣಾಮ ಬೀರುವ ಅಂಶಗಳು
- ಭವಿಷ್ಯದಲ್ಲಿ ಮಾನವ-ರೋಬೋಟ್ ಸಂವಹನ
- ಅಂತಿಮಗೊಳಿಸು
ತಂತ್ರಜ್ಞಾನವು ಮುಂದುವರೆದಂತೆ, ರೋಬೋಟ್ಗಳೊಂದಿಗಿನ ನಮ್ಮ ಸಂವಹನವು ಹೆಚ್ಚು ನಿಕಟವಾಗುತ್ತದೆ.
ಮಾನವ-ರೋಬೋಟ್ ಪರಸ್ಪರ ಕ್ರಿಯೆಯು ಮಾನವ ಸಾಮರ್ಥ್ಯದ ಮಿತಿಗಳನ್ನು ಮರುರೂಪಿಸುತ್ತಿದೆ, ನಾವು ಹೇಗೆ ಸಂವಹನ ನಡೆಸುತ್ತೇವೆ ಎಂಬುದರಿಂದ ನಾವು ನಿಯೋಜಿಸುವ ಕರ್ತವ್ಯಗಳವರೆಗೆ.
ಮಾನವ-ರೋಬೋಟ್ ಪರಸ್ಪರ ಕ್ರಿಯೆಯ ಹಿಂದಿನ ಅಡಿಪಾಯಗಳ ಆಳವಾದ ತನಿಖೆಯಲ್ಲಿ ಈ ಪರಸ್ಪರ ಕ್ರಿಯೆಯ ಹಿಂದಿನ ವಿಜ್ಞಾನವನ್ನು ಅನ್ವೇಷಿಸೋಣ.
ಮಾನವ-ರೋಬೋಟ್ ಪರಸ್ಪರ ಕ್ರಿಯೆ ನಿಖರವಾಗಿ ಏನು?
ಮಾನವ-ರೋಬೋಟ್ ಪರಸ್ಪರ ಕ್ರಿಯೆಯು ಜನರು ಮತ್ತು ರೋಬೋಟ್ಗಳು ಪರಸ್ಪರ ಹೇಗೆ ಸಂವಹನ ನಡೆಸುತ್ತವೆ ಎಂಬುದನ್ನು ವಿವರಿಸುತ್ತದೆ.
ಇದು ಎರಡು ಪಕ್ಷಗಳು ಮಾಹಿತಿ ಮತ್ತು ಪ್ರತಿಕ್ರಿಯೆಯನ್ನು ವಿನಿಮಯ ಮಾಡಿಕೊಳ್ಳುತ್ತದೆ. ಅಂತೆಯೇ, ಮಾನವರಿಗೆ ಸುರಕ್ಷಿತ ರೋಬೋಟ್ಗಳನ್ನು ಅಭಿವೃದ್ಧಿಪಡಿಸುವಲ್ಲಿ ಇದು ನಿರ್ಣಾಯಕ ಅಂಶವಾಗಿದೆ.
ಮಾನವ-ರೋಬೋಟ್ ಪರಸ್ಪರ ಕ್ರಿಯೆಯನ್ನು ಹೇಗೆ ಸಾಧಿಸಬಹುದು?
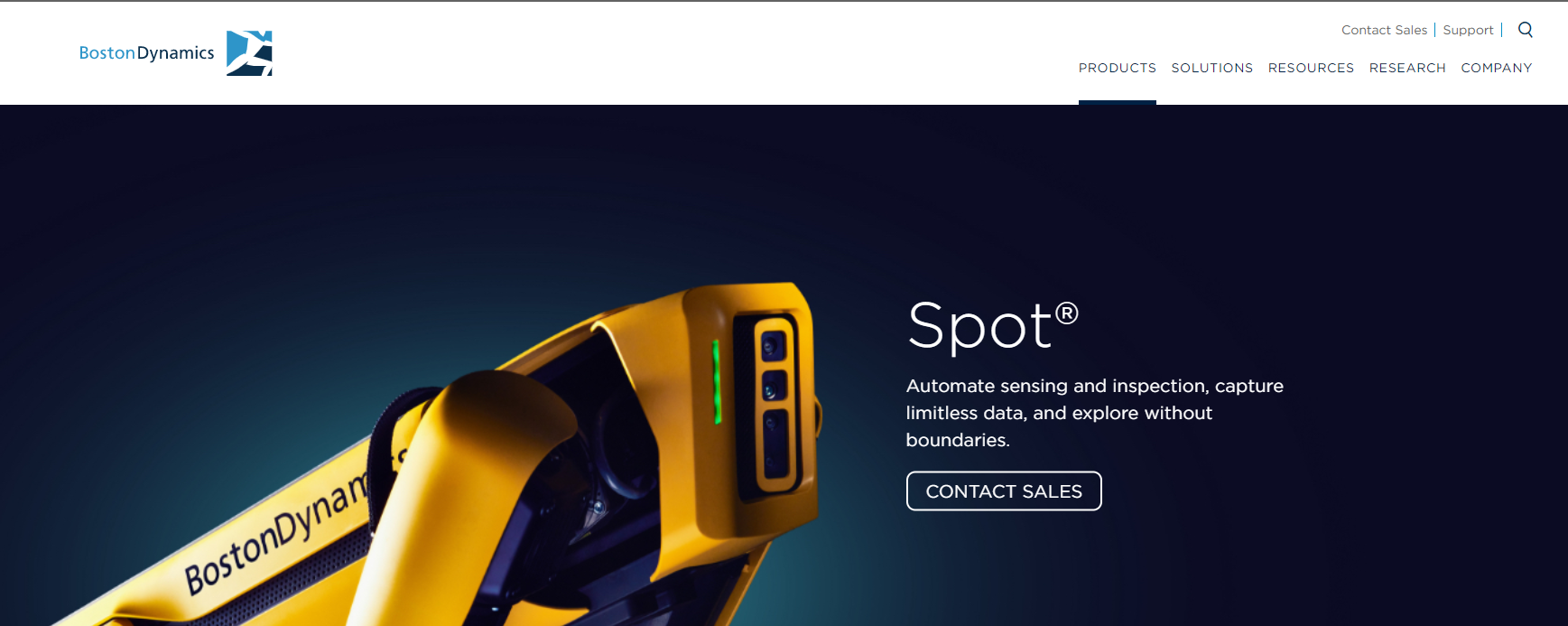
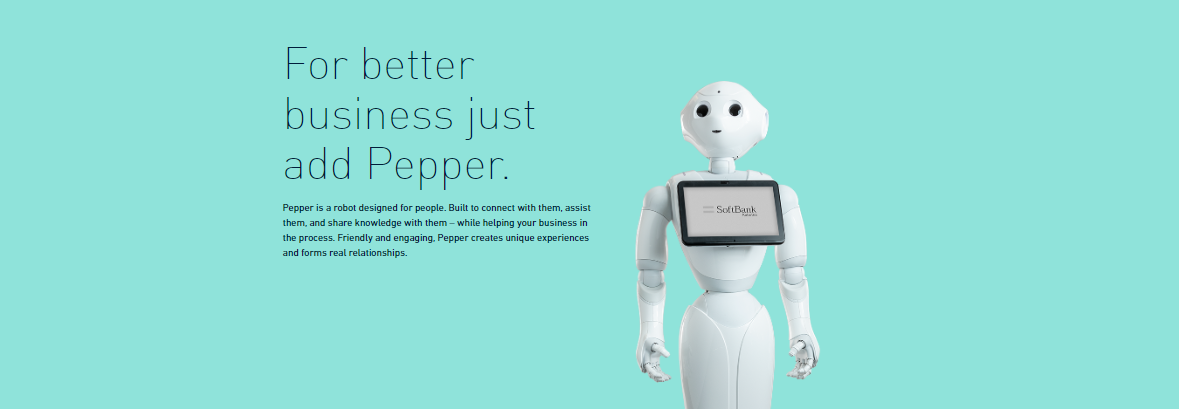
ಮಾನವ-ರೋಬೋಟ್ ಪರಸ್ಪರ ಕ್ರಿಯೆಯ ವಿಧಾನಗಳು ವಿವಿಧ ವಿಧಾನಗಳನ್ನು ಒಳಗೊಂಡಿವೆ. ಸಾಫ್ಟ್ಬ್ಯಾಂಕ್ ರೊಬೊಟಿಕ್ಸ್ ಮತ್ತು ಬೋಸ್ಟನ್ ಡೈನಾಮಿಕ್ಸ್ನಂತಹ ಕಂಪನಿಗಳು ಮಾನವ-ರೋಬೋಟ್ ಸಂವಹನವನ್ನು ಅಭಿವೃದ್ಧಿಪಡಿಸುತ್ತಿವೆ. ಅಲ್ಲದೆ, ಕಾರ್ನೆಗೀ ಮೆಲಾನ್ ವಿಶ್ವವಿದ್ಯಾಲಯ ಮತ್ತು MIT ಯಂತಹ ಕಾಲೇಜುಗಳು ಈ ಪ್ರದೇಶದಲ್ಲಿ ಪ್ರವರ್ತಕರಾಗಿದ್ದಾರೆ.
ಸಾಫ್ಟ್ಬ್ಯಾಂಕ್ ರೊಬೊಟಿಕ್ಸ್ನ ಪೆಪ್ಪರ್ ರೋಬೋಟ್, ಉದಾಹರಣೆಗೆ, ಮಾನವ ಭಾವನೆಗಳನ್ನು ಗುರುತಿಸಲು ಮತ್ತು ಪ್ರತಿಕ್ರಿಯಿಸಲು AI ಅಲ್ಗಾರಿದಮ್ಗಳನ್ನು ಬಳಸಿಕೊಳ್ಳುತ್ತದೆ.
ಅಲ್ಲದೆ, ಬೋಸ್ಟನ್ ಡೈನಾಮಿಕ್ಸ್' ಸ್ಪಾಟ್ಮಿನಿ ರೋಬೋಟ್ ತನ್ನ ಸುತ್ತಮುತ್ತಲಿನ ಪ್ರದೇಶಗಳೊಂದಿಗೆ ಸಂವಹನ ನಡೆಸುತ್ತದೆ ಮತ್ತು ನ್ಯಾವಿಗೇಟ್ ಮಾಡುತ್ತದೆ. ಇವು ಕೇವಲ ಕೆಲವು ನವೀನ ವಿಧಾನಗಳಾಗಿವೆ.
ಮಾನವ-ರೋಬೋಟ್ ಸಂವಹನದ ಬಗ್ಗೆ ನಾವು ಏಕೆ ಕಾಳಜಿ ವಹಿಸುತ್ತೇವೆ?
ಮಾನವ-ರೋಬೋಟ್ ಸಂವಹನವು ವೇಗವಾಗಿ ಬೆಳೆಯುತ್ತಿರುವ ವಿಷಯವಾಗಿದೆ.
ಮತ್ತು, ಇದು ರೋಬೋಟ್ಗಳೊಂದಿಗಿನ ನಮ್ಮ ಸಂವಹನಗಳ ಬಗ್ಗೆ ನಾವು ಯೋಚಿಸುವ ವಿಧಾನವನ್ನು ಬದಲಾಯಿಸುತ್ತಿದೆ. ಇದು ಮೂಲಭೂತವಾಗಿ ಜನರು ಮತ್ತು ರೋಬೋಟ್ಗಳು ಪರಸ್ಪರ ಹೇಗೆ ಸಂವಹನ ನಡೆಸುತ್ತದೆ ಎಂಬುದನ್ನು ನಿಯಂತ್ರಿಸುವ ವ್ಯವಸ್ಥೆಗಳನ್ನು ಅರ್ಥಮಾಡಿಕೊಳ್ಳುವುದು.
ಸನ್ನೆಗಳಿಂದ ಸಂಭಾಷಣೆಗೆ ಈ ನಿಶ್ಚಿತಾರ್ಥವು ಹಿಂದೆ ಅಸಾಧ್ಯವೆಂದು ಪರಿಗಣಿಸಲ್ಪಟ್ಟ ಮಿತಿಗಳನ್ನು ತಳ್ಳುತ್ತಿದೆ. ಇದು ಭವಿಷ್ಯಕ್ಕೆ ಹೊಸ ದಾರಿಗಳನ್ನು ತೆರೆಯುತ್ತಿದೆ.
ಮಾನವ-ರೋಬೋಟ್ ಪರಸ್ಪರ ಕ್ರಿಯೆಯ ಸಾಮರ್ಥ್ಯ
ರೋಬೋಟ್ಗಳು ಹೆಚ್ಚು ಸಾಮರ್ಥ್ಯ ಮತ್ತು ಹೆಚ್ಚು ಬುದ್ಧಿವಂತಿಕೆಯನ್ನು ಬೆಳೆಸಿಕೊಂಡಂತೆ, ನಾವು ಅವುಗಳನ್ನು ಹೆಚ್ಚು ಹೆಚ್ಚು ಚಟುವಟಿಕೆಗಳಲ್ಲಿ ಬಳಸಲು ಸಾಧ್ಯವಾಗುತ್ತದೆ. ನಾವು ಆಸ್ಪತ್ರೆಗಳು, ಶಾಲೆಗಳು ಅಥವಾ ಬ್ಯಾಂಕ್ಗಳಲ್ಲಿ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ರೋಬೋಟ್ಗಳನ್ನು ಹೊಂದಿದ್ದೇವೆ. ಅವರು ನಮ್ಮ ಜೀವನದಲ್ಲಿ ಹೆಚ್ಚು ಅಳವಡಿಸಿಕೊಳ್ಳುವುದರಿಂದ ನಾವು ಮಾನವ ಸುತ್ತಮುತ್ತಲಿನ ಪ್ರದೇಶಗಳಲ್ಲಿ ಉತ್ತಮವಾಗಿ ಕಾರ್ಯನಿರ್ವಹಿಸುವ ಅಗತ್ಯವಿದೆ.
ಜನರು ಮತ್ತು ರೋಬೋಟ್ಗಳು ಪರಸ್ಪರ ಹೇಗೆ ಸಂವಹನ ನಡೆಸುತ್ತವೆ ಎಂಬುದರ ಕುರಿತು ನಾವು ಇನ್ನಷ್ಟು ತಿಳಿದುಕೊಳ್ಳಬೇಕು.
ರೋಬೋಟ್ಗಳು ಲೋಹೀಯ ಜೀವಿಗಳ ಕ್ಲಾಸಿಕ್ "ಹಾಲಿವುಡ್" ಚಿತ್ರವಲ್ಲ ಎಂದು ನಾವು ಒಮ್ಮೆ ಭಾವಿಸಿದ್ದೇವೆ. ಅವರು ವಿಕಸನಗೊಳ್ಳುತ್ತಿದ್ದಾರೆ ಮತ್ತು ಮಾನವ ಜೀವನಕ್ಕೆ ಹೆಚ್ಚು ಅನುಸರಣೆಯಾಗುತ್ತಿದ್ದಾರೆ. ಮುಂತಾದ ಬೆಳವಣಿಗೆಗಳಿವೆ; ಜೈವಿಕ ರೋಬೋಟ್ಗಳು, ಸಾಮಾಜಿಕ ರೋಬೋಟ್ಗಳು, ಮೃದು ರೋಬೋಟ್ಗಳು... ಮತ್ತು ಇನ್ನೂ ಅನೇಕ.
ನಾವು ರೋಬೋಟ್ಗಳನ್ನು ರಚಿಸಲು ಪ್ರಯತ್ನಿಸುತ್ತೇವೆ ಅದು ಕೇವಲ ಪರಿಣಾಮಕಾರಿಯಾಗಿರುವುದಿಲ್ಲ ಆದರೆ ಜನರು ಕೆಲಸ ಮಾಡಲು ಮತ್ತು ಪಕ್ಕದಲ್ಲಿ ವಾಸಿಸಲು ಸುರಕ್ಷಿತವಾಗಿದೆ.
ಮಾನವ-ರೋಬೋಟ್ ಪರಸ್ಪರ ಕ್ರಿಯೆಯನ್ನು ಹೆಚ್ಚು ನೈಸರ್ಗಿಕವಾಗಿ ಮಾಡುವುದು ಅನೇಕ ಉದ್ಯಮಗಳಲ್ಲಿ ಹೊಸ ಅವಕಾಶಗಳನ್ನು ತೆರೆಯುತ್ತದೆ.
ಹಿನ್ನೆಲೆ
ಮಾನವ-ರೋಬೋಟ್ ಪರಸ್ಪರ ಕ್ರಿಯೆಯ ಹಿನ್ನೆಲೆ ಗಮನಾರ್ಹವಾಗಿದೆ. ರೊಬೊಟಿಕ್ಸ್ನ ಆರಂಭಿಕ ದಿನಗಳಲ್ಲಿ, ಅವು ಪುನರಾವರ್ತಿತ ಕಾರ್ಯಗಳನ್ನು ನಿರ್ವಹಿಸುವ ಸರಳ ಸಾಧನಗಳಾಗಿವೆ. ಉದಾಹರಣೆಗೆ, ನಾವು ಕಾರ್ಖಾನೆಗಳಲ್ಲಿ ರೋಬೋಟ್ಗಳನ್ನು ಅಸೆಂಬ್ಲಿ ಲೈನ್ ರೋಬೋಟ್ಗಳಾಗಿ ಬಳಸಿದ್ದೇವೆ.
ಬೆಳವಣಿಗೆಗಳು ಮುಂದುವರೆದಂತೆ, ರೋಬೋಟ್ಗಳು ತಮ್ಮ ಪರಿಸರಕ್ಕೆ ಹೆಚ್ಚು ಸಂವೇದನಾಶೀಲವಾಗತೊಡಗಿದವು. ಹೊಸ ಸಂವೇದಕಗಳು ಮತ್ತು ಸಾಫ್ಟ್ವೇರ್ ಅನ್ನು ಪರಿಚಯಿಸಲಾಯಿತು. ಇದು ಹೆಚ್ಚು ಸೂಕ್ಷ್ಮ ಮತ್ತು ಸಂಕೀರ್ಣ ಮಾನವ-ರೋಬೋಟ್ ಪರಸ್ಪರ ಕ್ರಿಯೆಗಳಿಗೆ ಕಾರಣವಾಯಿತು.
ವಿನಮ್ರ ಮೂಲದಿಂದ ಅತ್ಯಾಧುನಿಕ ಸಂಶೋಧನೆಯವರೆಗೆ, ಮಾನವ-ರೋಬೋಟ್ ಪರಸ್ಪರ ಕ್ರಿಯೆಯ ಇತಿಹಾಸವು ಸೃಜನಶೀಲತೆ ಮತ್ತು ಸಹಕಾರವಾಗಿದೆ.
ಮಾನವ-ರೋಬೋಟ್ ಸಂವಹನಕ್ಕಾಗಿ ವಿನ್ಯಾಸಗಳು
1- ಕಾರ್ಯ-ಆಧಾರಿತ ವಿಧಾನಗಳು
ನಿರ್ದಿಷ್ಟ ಕಾರ್ಯಗಳನ್ನು ನಿರ್ವಹಿಸುವ ಸಾಮರ್ಥ್ಯವು ಕಾರ್ಯ-ಆಧಾರಿತ ವಿಧಾನದ ಮುಖ್ಯ ಕೇಂದ್ರವಾಗಿದೆ. ಈ ವಿಧಾನದಿಂದ, ಅದರ ನಿರ್ದಿಷ್ಟ ಕಾರ್ಯಗಳನ್ನು ನಿರ್ವಹಿಸುವಲ್ಲಿ ರೋಬೋಟ್ನ ದಕ್ಷತೆಯನ್ನು ಹೊಂದುವಂತೆ ಮಾಡಲಾಗಿದೆ. ಈ ವಿಧಾನವು ತಾಂತ್ರಿಕ ಅವಶ್ಯಕತೆಗಳು ಮತ್ತು ಕಾರ್ಯಕ್ಷಮತೆಯ ಕ್ರಮಗಳಿಗೆ ಹೆಚ್ಚು ಒತ್ತು ನೀಡುತ್ತದೆ.
ರೋಬೋಟ್ ಜನರೊಂದಿಗೆ ಹೇಗೆ ಸಂವಹನ ನಡೆಸುತ್ತದೆ ಎಂಬುದಕ್ಕೆ ಇದು ಸ್ವಲ್ಪ ಕಡಿಮೆ ಪ್ರಾಮುಖ್ಯತೆಯನ್ನು ನೀಡುತ್ತದೆ. ಕಾರ್ಯ-ಆಧಾರಿತ ವಿಧಾನವನ್ನು ಬಳಸುವ ಎಂಜಿನಿಯರ್ಗಳು ರೋಬೋಟ್ ತನ್ನ ಕಾರ್ಯಗಳನ್ನು ನಿಖರವಾಗಿ ನಿರ್ವಹಿಸಬಹುದೆಂದು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳಲು ಹೆಚ್ಚಿನ ಆದ್ಯತೆಯನ್ನು ನೀಡುತ್ತಾರೆ.
2- ಪರಸ್ಪರ ಕ್ರಿಯೆಯ ಮೇಲೆ ಕೇಂದ್ರೀಕೃತವಾಗಿರುವ ವಿಧಾನಗಳು
ಮಾನವ-ರೋಬೋಟ್ ಪರಸ್ಪರ ವಿನ್ಯಾಸ ಪ್ರಕ್ರಿಯೆಯು ಪರಸ್ಪರ-ಆಧಾರಿತ ವಿಧಾನವನ್ನು ಬಳಸುತ್ತದೆ. ರೋಬೋಟ್ ಜನರೊಂದಿಗೆ ಹೇಗೆ ಸಂವಹನ ನಡೆಸುತ್ತದೆ ಎಂಬುದನ್ನು ಇದು ನಿರ್ದಿಷ್ಟವಾಗಿ ಒತ್ತಿಹೇಳುತ್ತದೆ. ಈ ತಂತ್ರವು ನೈಸರ್ಗಿಕವಾಗಿ ಜನರೊಂದಿಗೆ ಸಂವಹನ ನಡೆಸುವ ರೋಬೋಟ್ಗಳನ್ನು ರಚಿಸುವ ಗುರಿಯನ್ನು ಹೊಂದಿದೆ.
ಇದು ರೋಬೋಟ್ನ ಭೌತಿಕ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಒಳಗೊಂಡಂತೆ ಅಂಶಗಳನ್ನು ಗಣನೆಗೆ ತೆಗೆದುಕೊಳ್ಳುತ್ತದೆ, ಬಳಕೆದಾರ ಇಂಟರ್ಫೇಸ್, ಮತ್ತು ಸಂವಹನ ವಿಧಾನಗಳು. ದಿ ಬಳಕೆದಾರ ಅನುಭವ ಮತ್ತು ರೋಬೋಟ್ ಸರಾಗವಾಗಿ ಮಾನವನ ಸನ್ನಿವೇಶಗಳಲ್ಲಿ ಸಂಯೋಜನೆಗೊಳ್ಳುವುದನ್ನು ಖಚಿತಪಡಿಸಿಕೊಳ್ಳುವುದು ಈ ತಂತ್ರದ ಕೇಂದ್ರವಾಗಿದೆ.
3- ಮಾನವ-ಕೇಂದ್ರಿತ ವಿಧಾನಗಳು
ರೋಬೋಟ್ ಅನ್ನು ಬಳಸಿಕೊಳ್ಳುವ ಜನರ ಅಗತ್ಯತೆಗಳು ಮಾನವ-ಕೇಂದ್ರಿತ ವಿಧಾನದ ಮಧ್ಯಭಾಗದಲ್ಲಿವೆ.
ಈ ವಿಧಾನದಿಂದ, ವಿವಿಧ ಪರಿಸ್ಥಿತಿಗಳಿಗೆ ಹೊಂದಿಕೊಳ್ಳುವ ರೋಬೋಟ್ಗಳನ್ನು ರಚಿಸಲಾಗಿದೆ. ಅನೇಕ ಅಂಶಗಳನ್ನು ದೈಹಿಕ, ಅರಿವಿನ ಮತ್ತು ಭಾವನಾತ್ಮಕ ಮಾನವ ನಡವಳಿಕೆಯಂತೆ ಪರಿಗಣಿಸಲಾಗುತ್ತದೆ.
ಈ ವಿಧಾನವು ಬಳಕೆದಾರ ಸ್ನೇಹಿ, ತಲುಪಬಹುದಾದ ಮತ್ತು ಬಳಸಲು ಸರಳವಾದ ರೋಬೋಟ್ಗಳನ್ನು ತಯಾರಿಸುವುದರ ಮೇಲೆ ಕೇಂದ್ರೀಕರಿಸುತ್ತದೆ. ಒಟ್ಟಾರೆಯಾಗಿ, ಈ ವಿಧಾನವು ರೋಬೋಟ್ಗಳನ್ನು ರಚಿಸಲು ಪ್ರಯತ್ನಿಸುತ್ತದೆ, ಅದು ಮನರಂಜನೆ ಮತ್ತು ತೊಡಗಿಸಿಕೊಳ್ಳಲು ಲಾಭದಾಯಕವಾಗಿದೆ.
4- ಹೈಬ್ರಿಡ್ ವಿಧಾನಗಳು
ಮಾನವ-ರೋಬೋಟ್ ಸಂವಹನಗಳ ವಿನ್ಯಾಸದಲ್ಲಿ, ಹೈಬ್ರಿಡ್ ವಿಧಾನವು ವಿಶೇಷ ಪರಸ್ಪರ ಕ್ರಿಯೆಯನ್ನು ಒದಗಿಸಲು ಅನೇಕ ವಿಧಾನಗಳಿಂದ ಘಟಕಗಳನ್ನು ಸಂಯೋಜಿಸುತ್ತದೆ. ಇದು ತಾಂತ್ರಿಕ ಅವಶ್ಯಕತೆಗಳು ಮತ್ತು ಬಳಕೆದಾರರ ಅನುಭವ ಎರಡನ್ನೂ ಗಣನೆಗೆ ತೆಗೆದುಕೊಳ್ಳುತ್ತದೆ.
ರೋಬೋಟ್ನ ಕಾರ್ಯನಿರ್ವಹಣೆ ಮತ್ತು ಅದು ಜನರೊಂದಿಗೆ ಹೇಗೆ ಸಂವಹನ ನಡೆಸುತ್ತದೆ ಎಂಬುದನ್ನು ಗಣನೆಗೆ ತೆಗೆದುಕೊಳ್ಳುವ ಮೂಲಕ, ಈ ವಿಧಾನವು ವಿನ್ಯಾಸಕಾರರಿಗೆ ತಾಂತ್ರಿಕವಾಗಿ ಅತ್ಯಾಧುನಿಕ ಮತ್ತು ಬಳಕೆದಾರ ಸ್ನೇಹಿಯಾಗಿರುವ ರೋಬೋಟ್ಗಳನ್ನು ಉತ್ಪಾದಿಸಲು ಅನುವು ಮಾಡಿಕೊಡುತ್ತದೆ.
ಉನ್ನತ ತಾಂತ್ರಿಕ ಕಾರ್ಯಕ್ಷಮತೆ ಮತ್ತು ಸಕಾರಾತ್ಮಕ ಬಳಕೆದಾರ ಅನುಭವದ ನಡುವೆ ಸಮತೋಲನವನ್ನು ರಚಿಸುವುದು ಗುರಿಯಾಗಿದೆ. ಈ ತಂತ್ರವು ಡಿಸೈನರ್ಗಳಿಗೆ ರೋಬೋಟ್ಗಳನ್ನು ಅಭಿವೃದ್ಧಿಪಡಿಸಲು ಅನುವು ಮಾಡಿಕೊಡುತ್ತದೆ, ಅದು ಪರಿಣಾಮಕಾರಿ ಮಾತ್ರವಲ್ಲದೆ ಸಂತೋಷದಾಯಕ ಮತ್ತು ತೊಡಗಿಸಿಕೊಳ್ಳಲು ಲಾಭದಾಯಕವಾಗಿದೆ.
ಮಾನವರು-ರೋಬೋಟ್ಗಳ ಪರಸ್ಪರ ಕ್ರಿಯೆಯ ಮೇಲೆ ಪರಿಣಾಮ ಬೀರುವ ಅಂಶಗಳು
A. ರೋಬೋಟ್ನ ವಿನ್ಯಾಸ
ಮಾನವ-ರೋಬೋಟ್ ಪರಸ್ಪರ ಕ್ರಿಯೆಯ ಯಶಸ್ಸು ರೋಬೋಟ್ನ ವಿನ್ಯಾಸದ ಮೇಲೆ ಹೆಚ್ಚು ಅವಲಂಬಿತವಾಗಿದೆ. ರೋಬೋಟ್ ಎಷ್ಟು ಯಶಸ್ವಿಯಾಗಿ ಕರ್ತವ್ಯಗಳನ್ನು ನಿರ್ವಹಿಸುತ್ತದೆ ಮತ್ತು ಮನುಷ್ಯರೊಂದಿಗೆ ಸಂವಹನ ನಡೆಸುತ್ತದೆ ಎಂಬುದನ್ನು ಇದು ನಿರ್ಧರಿಸುತ್ತದೆ. ರೋಬೋಟ್ನ ಭೌತಿಕ ಗುಣಲಕ್ಷಣಗಳಾದ ಅದರ ಆಕಾರ, ಗಾತ್ರ ಮತ್ತು ನೋಟವು ಪ್ರಮುಖ ಭಾಗವನ್ನು ಹೊಂದಿದೆ. ಈ ವೈಶಿಷ್ಟ್ಯಗಳು ಇತರರಲ್ಲಿ ನಂಬಿಕೆಯನ್ನು ಪ್ರೇರೇಪಿಸುವ ಸಾಮರ್ಥ್ಯವನ್ನು ಹೊಂದಿವೆ.
ಉದಾಹರಣೆಗೆ, ಸ್ನೇಹಪರ ನೋಟವನ್ನು ಹೊಂದಿರುವ ರೋಬೋಟ್ಗಳು ಜಪಾನ್ನಲ್ಲಿ ರೋಗಿಗಳ ಆರೈಕೆಯಲ್ಲಿ ಒಲವು ತೋರುತ್ತವೆ. ಇನ್ನೊಂದು ಪ್ರಕರಣ ಅದು; ತ್ವರಿತವಾಗಿ ವಿಸ್ತರಿಸುವುದು ಮೃದು ರೊಬೊಟಿಕ್ಸ್. ಇದು ರೋಬೋಟ್ ವಿನ್ಯಾಸದಲ್ಲಿ ಹೊಂದಿಕೊಳ್ಳುವ ವಸ್ತುಗಳನ್ನು ಬಳಸುತ್ತದೆ. ಈ ರೋಬೋಟ್ಗಳು ಒಳರೋಗಿ ಮತ್ತು ಮಕ್ಕಳ ಆರೈಕೆಗೆ ಸೇವೆ ಸಲ್ಲಿಸುವ ಸಾಮರ್ಥ್ಯವನ್ನು ಹೊಂದಿವೆ. ಮತ್ತು, ಇದು ನಮ್ಮ ಸಂವಹನಗಳನ್ನು ಸಂಪೂರ್ಣವಾಗಿ ಪರಿವರ್ತಿಸುವ ಸಾಮರ್ಥ್ಯವನ್ನು ಹೊಂದಿದೆ.
B. ಬಳಕೆದಾರ ಇಂಟರ್ಫೇಸ್
ಬಳಕೆದಾರ ಇಂಟರ್ಫೇಸ್ ಮುಖ್ಯವಾಗಿದೆ ಏಕೆಂದರೆ ಇದು ಮಾನವರು ರೋಬೋಟ್ಗಳೊಂದಿಗೆ ಎಷ್ಟು ಯಶಸ್ವಿಯಾಗಿ ಸಂವಹನ ನಡೆಸಬಹುದು ಎಂಬುದರ ಮೇಲೆ ಪರಿಣಾಮ ಬೀರುತ್ತದೆ. ಉತ್ತಮವಾಗಿ ವಿನ್ಯಾಸಗೊಳಿಸಲಾದ ಬಳಕೆದಾರ ಇಂಟರ್ಫೇಸ್ ಅರ್ಥಗರ್ಭಿತವಾಗಿರಬೇಕು. ಇದು ಬಳಸಲು ಸರಳವಾಗಿರಬೇಕು ಮತ್ತು ಬಳಕೆದಾರರಿಗೆ ನೈಜ-ಸಮಯದ ಪ್ರತಿಕ್ರಿಯೆಯನ್ನು ನೀಡುತ್ತದೆ. ಪರಸ್ಪರ ಕ್ರಿಯೆಯ ಪ್ರಕಾರವನ್ನು ಪರಿಶೀಲಿಸುವುದು ಸಹ ಅಗತ್ಯವಾಗಿದೆ, ಅದು ಪದ, ಗೆಸ್ಚರ್, ಸ್ಪರ್ಶ ಅಥವಾ ಇವುಗಳ ಮಿಶ್ರಣವಾಗಿರಬಹುದು.
ಸ್ಪೀಚ್-ಆಧಾರಿತ ಇಂಟರ್ಫೇಸ್ಗಳು, ಉದಾಹರಣೆಗೆ, ವೈಯಕ್ತಿಕ ಸಹಾಯಕ ರೋಬೋಟ್ಗಳಿಗೆ ಸೂಕ್ತವಾಗಿರುತ್ತದೆ. ಮತ್ತು, ಬಯೋನಿಕ್ ಸಾಧನಗಳಿಗೆ ಸ್ಪರ್ಶ-ಆಧಾರಿತ ಇಂಟರ್ಫೇಸ್ಗಳು ಹೆಚ್ಚು ಸೂಕ್ತವಾಗಿವೆ.
C. ಸಾಮಾಜಿಕ ಮತ್ತು ಸಾಂಸ್ಕೃತಿಕ ನಿರೀಕ್ಷೆಗಳು
ಸಾಮಾಜಿಕ ಮತ್ತು ಸಾಂಸ್ಕೃತಿಕ ಮಾನದಂಡಗಳು ಮಾನವ-ರೋಬೋಟ್ ಪರಸ್ಪರ ಕ್ರಿಯೆಯನ್ನು ಗಮನಾರ್ಹವಾಗಿ ಪ್ರಭಾವಿಸುತ್ತವೆ. ಸಾಂಸ್ಕೃತಿಕ ಮತ್ತು ಸಾಮಾಜಿಕ ಹಿನ್ನೆಲೆಗಳು ರೋಬೋಟ್ಗಳ ಬಗ್ಗೆ ಜನರ ಆಲೋಚನೆಗಳು ಮತ್ತು ವರ್ತನೆಗಳ ಮೇಲೆ ಪ್ರಭಾವ ಬೀರುತ್ತವೆ. ಕೆಲವು ಸಂಸ್ಕೃತಿಗಳಲ್ಲಿ, ಉದಾಹರಣೆಗೆ, ರೋಬೋಟ್ಗಳನ್ನು ನಿರ್ದಿಷ್ಟ ಉದ್ಯೋಗಗಳಿಗೆ ಸಾಧನವೆಂದು ಪರಿಗಣಿಸಲಾಗುತ್ತದೆ. ಇತರರಲ್ಲಿ, ಅವರನ್ನು ಸಹಚರರು ಅಥವಾ ಸ್ನೇಹಿತರಂತೆ ನೋಡಲಾಗುತ್ತದೆ.
ವಿನ್ಯಾಸಕಾರರು ಈ ಸಾಂಸ್ಕೃತಿಕ ಭಿನ್ನತೆಗಳನ್ನು ಗಮನದಲ್ಲಿಟ್ಟುಕೊಳ್ಳಬೇಕು. ಅವರು ಸಾಂಸ್ಕೃತಿಕವಾಗಿ ಸೂಕ್ತವಾದ ಮತ್ತು ಸ್ವೀಕಾರಾರ್ಹವಾದ ರೋಬೋಟ್ಗಳನ್ನು ರಚಿಸುತ್ತಾರೆ.
D. ಕೃತಕ ಬುದ್ಧಿಮತ್ತೆ ಮತ್ತು ಯಂತ್ರ ಕಲಿಕೆಯ ಪಾತ್ರ
AI ಯ ಪ್ರಾಮುಖ್ಯತೆ ಮತ್ತು ಯಂತ್ರ ಕಲಿಕೆ ಮಾನವ-ರೋಬೋಟ್ ಪರಸ್ಪರ ಕ್ರಿಯೆಯಲ್ಲಿ ಬೆಳೆಯುತ್ತಿದೆ. AI ರೋಬೋಟ್ಗಳಿಗೆ ತೀರ್ಪುಗಳನ್ನು ನೀಡಲು ಮತ್ತು ಮಾನವ ಸಂವಹನಗಳಿಂದ ಕಲಿಯಲು ಅನುವು ಮಾಡಿಕೊಡುತ್ತದೆ. ಈಗ, ರೋಬೋಟ್ಗಳು ಪರಸ್ಪರ ಕ್ರಿಯೆಗಳಲ್ಲಿ ಹೆಚ್ಚು ಪರಿಣಾಮಕಾರಿ ಮತ್ತು ಪರಿಣಾಮಕಾರಿಯಾಗಿವೆ.
ಯಂತ್ರ ಕಲಿಕೆ ಕ್ರಮಾವಳಿಗಳು ಮಾನವ-ರೋಬೋಟ್ ಸಂವಹನಗಳಿಂದ ಡೇಟಾವನ್ನು ಮೌಲ್ಯಮಾಪನ ಮಾಡಿ. ಮತ್ತು, ಅವರು ಕಾಲಾನಂತರದಲ್ಲಿ ರೋಬೋಟ್ನ ಕಾರ್ಯಕ್ಷಮತೆಯನ್ನು ಹೆಚ್ಚಿಸುತ್ತಾರೆ.
ಭವಿಷ್ಯದಲ್ಲಿ ಮಾನವ-ರೋಬೋಟ್ ಸಂವಹನ
AI ಮತ್ತು ರೊಬೊಟಿಕ್ಸ್ ಪ್ರಗತಿಗಳು
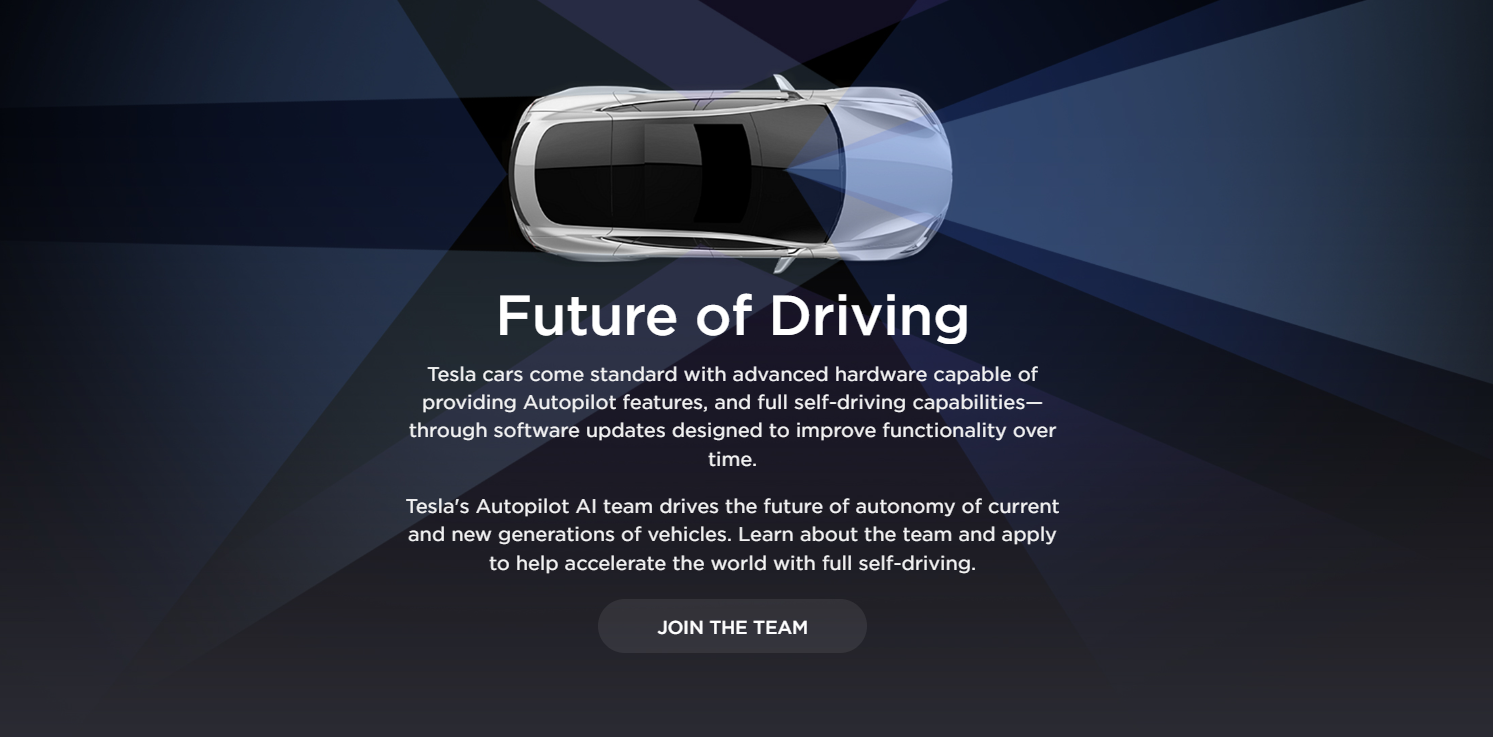
AI ಕ್ಷೇತ್ರವು ತ್ವರಿತವಾಗಿ ಪ್ರಗತಿಯಲ್ಲಿದೆ, ಇದು ರೋಬೋಟ್ಗಳ ಭವಿಷ್ಯವನ್ನು ಬದಲಾಯಿಸುತ್ತಿದೆ. ಉದಾಹರಣೆಗೆ ಟೆಸ್ಲಾ ಮತ್ತು ಹೋಂಡಾ ಕಂಪನಿಗಳು ಸ್ವಯಂ ಚಾಲಿತ ಕಾರುಗಳನ್ನು ರಚಿಸುತ್ತಿವೆ. ಅವರು ಶೀಘ್ರದಲ್ಲೇ ನಮ್ಮ ದೈನಂದಿನ ಜೀವನದ ಭಾಗವಾಗುತ್ತಾರೆ.
ದೈನಂದಿನ ಜೀವನದಲ್ಲಿ ಮಾನವ-ರೋಬೋಟ್ ಸಂವಹನದ ಸಂಯೋಜನೆ
ಮಾನವ-ರೋಬೋಟ್ ಸಂಪರ್ಕವು ಇನ್ನು ಮುಂದೆ ವೈಜ್ಞಾನಿಕ ಕಾಲ್ಪನಿಕವಲ್ಲ; ಇದು ರಿಯಾಲಿಟಿ ಆಗುತ್ತಿದೆ. ರೋಬೋಟ್ಗಳು ಕ್ರಮೇಣ ನಮ್ಮ ಮನೆಗಳು ಮತ್ತು ಸಾರ್ವಜನಿಕ ಸೆಟ್ಟಿಂಗ್ಗಳಲ್ಲಿ ಪರಿಚಿತ ದೃಶ್ಯವಾಗುತ್ತಿವೆ. ನಾವು ಈಗಾಗಲೇ ಅಮೆಜಾನ್ನ ಅಲೆಕ್ಸಾ ಮತ್ತು ಗೂಗಲ್ ಹೋಮ್ನಂತಹ ಗ್ರಾಹಕ ಸೇವಾ ರೋಬೋಟ್ಗಳಂತಹ ವೈಯಕ್ತಿಕ ಗೃಹ ಸಹಾಯಕರನ್ನು ಹೊಂದಿದ್ದೇವೆ ಸಾಫ್ಟ್ಬ್ಯಾಂಕ್ನ ಪೆಪ್ಪರ್.
ಸಂಭಾವ್ಯ ನ್ಯೂನತೆಗಳು
ವರ್ಧಿತ ದಕ್ಷತೆ ಮತ್ತು ಅನುಕೂಲತೆಯಂತಹ ಸಂಭಾವ್ಯ ಪ್ರಯೋಜನಗಳಿವೆ. ಆದಾಗ್ಯೂ, ಉದ್ಯೋಗ ನಷ್ಟದಂತಹ ನ್ಯೂನತೆಗಳೂ ಇವೆ. ಅಲ್ಲದೆ, ಅನೇಕ ಜನರು ಗೌಪ್ಯತೆ ಮತ್ತು ಸುರಕ್ಷತೆಯಂತಹ ನೈತಿಕ ಅಂಶಗಳ ಬಗ್ಗೆ ಕಾಳಜಿ ವಹಿಸುತ್ತಾರೆ.
ಮಾನವ-ರೋಬೋಟ್ ಸಂಪರ್ಕದ ಭವಿಷ್ಯಕ್ಕಾಗಿ ನೈತಿಕ ಪರಿಗಣನೆಗಳು
AI ಯ ಸರಿಯಾದ ಬಳಕೆ, ಡೇಟಾ ಗೌಪ್ಯತೆ ಮತ್ತು ಸ್ವಾಯತ್ತ ವ್ಯವಸ್ಥೆಗಳ ಜವಾಬ್ದಾರಿಯುತ ರಚನೆಯಂತಹ ನೈತಿಕ ಸಮಸ್ಯೆಗಳನ್ನು ಪರಿಹರಿಸಬೇಕು. ಕಂಪನಿಗಳು ಇಷ್ಟಪಡುತ್ತವೆ ಓಪನ್ಎಐ AI ಮತ್ತು ರೊಬೊಟಿಕ್ಸ್ನಲ್ಲಿ ನೈತಿಕ ಸಮಸ್ಯೆಗಳ ತನಿಖೆಯ ಪ್ರವರ್ತಕರಾಗಿದ್ದಾರೆ.
ಅಂತಿಮಗೊಳಿಸು
ಮಾನವ-ರೋಬೋಟ್ ಪರಸ್ಪರ ಕ್ರಿಯೆಯಲ್ಲಿನ ಸುಧಾರಣೆಗಳು ನಾವು ಬದುಕುವ ವಿಧಾನವನ್ನು ಪರಿವರ್ತಿಸುವ ಸಾಮರ್ಥ್ಯವನ್ನು ಹೊಂದಿವೆ. ನಾವು ಹೆಚ್ಚು ಸಮರ್ಥನೀಯ ರೋಬೋಟ್ ಉತ್ಪಾದನೆಯನ್ನು ನಿರೀಕ್ಷಿಸುತ್ತೇವೆ.
ಮರುಬಳಕೆ ಮಾಡಬಹುದಾದ ವಸ್ತುಗಳನ್ನು ಹೊಂದಿರುವ ರೋಬೋಟ್ಗಳು ಅಥವಾ ಪರಿಸರ ಸ್ನೇಹಿ ಕ್ರಿಯೆಗಳನ್ನು ನಿರ್ವಹಿಸುವಂತಹವುಗಳು ಬಹಳ ಭರವಸೆ ನೀಡುತ್ತವೆ. ಮಾನವ-ರೋಬೋಟ್ ಸಂವಹನಗಳಲ್ಲಿನ ಸುಧಾರಣೆಯು ಹೆಚ್ಚು ಪರಿಣಾಮಕಾರಿ ಕಾರ್ಯವಿಧಾನಗಳಿಗೆ ಕಾರಣವಾಗಬಹುದು. ಸುಧಾರಿತ ಕೆಲಸದ ಪರಿಸ್ಥಿತಿಗಳನ್ನು ಹೊಂದಲು ಇದು ನಮಗೆ ಸಹಾಯ ಮಾಡುತ್ತದೆ.
ಭವಿಷ್ಯವು ಈಗಾಗಲೇ ಇಲ್ಲಿದೆ ಮತ್ತು ಇದು ತುಂಬಾ ಉತ್ತೇಜಕವಾಗಿದೆ ಎಂದು ನಾವು ಭಾವಿಸುತ್ತೇವೆ.





ಪ್ರತ್ಯುತ್ತರ ನೀಡಿ