אנו מתמודדים עם בעיות אופטימיזציה בנסיבות רבות בעולם האמיתי שבהן עלינו לזהות את המינימום או המקסימום של פונקציה.
ראה פונקציה כייצוג מתמטי של מערכת, וקביעת המינימום או המקסימום שלה יכולה להיות קריטית עבור מגוון יישומים כגון למידת מכונה, הנדסה, פיננסים ואחרים.
קחו בחשבון נוף עם גבעות ועמקים, והמטרה שלנו היא למצוא את הנקודה הנמוכה ביותר (מינימום) כדי להגיע ליעדנו במהירות האפשרית.
אנו משתמשים לעתים קרובות באלגוריתמים של ירידה בשיפוע כדי לפתור אתגרי אופטימיזציה כאלה. אלגוריתמים אלו הם שיטות אופטימיזציה איטרטיביות למזעור פונקציה על ידי נקיטת צעדים בכיוון הירידה התלולה ביותר (שיפוע שלילי).
השיפוע משקף את הכיוון בעל העלייה התלולה ביותר בפונקציה, ונסיעה בכיוון ההפוך מובילה אותנו למינימום.
מהו בעצם אלגוריתם הירידה בדרגה?
ירידה בדרגה היא גישת אופטימיזציה איטרטיבית פופולרית לקביעת המינימום (או המקסימום) של פונקציה.
זהו כלי קריטי בכמה תחומים, כולל למידת מכונה, למידה עמוקה, בינה מלאכותית, הנדסה וכספים.
העיקרון הבסיסי של האלגוריתם מבוסס על השימוש שלו בגרדיאנט, המציג את כיוון העלייה החדה ביותר בערך הפונקציה.
האלגוריתם מנווט ביעילות את הנוף של הפונקציה לעבר המינימום על ידי נקיטת צעדים חוזרים ונשנים בכיוון ההפוך כמו השיפוע, תוך חידוד איטרטיבי של הפתרון עד להתכנסות.
מדוע אנו משתמשים באלגוריתמים של ירידה בהדרגה?
בתור התחלה, הם יכולים לשמש כדי לפתור מגוון רחב של בעיות אופטימיזציה, כולל בעיות עם חללים במימד גבוה ופונקציות מורכבות.
שנית, הם יכולים למצוא פתרונות אופטימליים במהירות, במיוחד כאשר הפתרון האנליטי אינו זמין או יקר מבחינה חישובית.
טכניקות של ירידה בדרגה ניתנות להרחבה ויכולות להתמודד בהצלחה עם מערכי נתונים עצומים.
כתוצאה מכך, הם נמצאים בשימוש נרחב ב אלגוריתמים למידת מכונה כמו אימון רשתות עצביות ללמוד מנתונים ולשנות את הפרמטרים שלהן כדי למזער טעויות חיזוי.
דוגמה מפורטת של שלבי ירידה בשיפוע
בואו נסתכל על דוגמה מפורטת יותר כדי להבין טוב יותר את טכניקת הירידה בשיפוע.
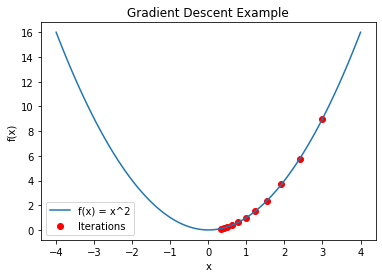
קחו בחשבון את הפונקציה הדו-ממדית f(x) = x2, אשר יוצרת עקומה פרבולית בסיסית עם מינימום ב-(2). אלגוריתם הירידה בשיפוע ישמש כדי לקבוע את הנקודה המינימלית הזו.
שלב 1: אתחול
אלגוריתם הירידה בשיפוע מתחיל באתחול הערך של המשתנה x, המיוצג כ-x0.
לערך ההתחלתי יכול להיות השפעה ניכרת על ביצועי האלגוריתם.
אתחול אקראי או שימוש בידע מוקדם של הבעיה הן שתי טכניקות נפוצות. נניח ש-x₀ = 3 בתחילת המקרה שלנו.
שלב 2: חשב את השיפוע
שיפוע הפונקציה f(x) במיקום הנוכחי x₀. לאחר מכן יש לחשב.
השיפוע מציין את השיפוע או קצב השינוי של הפונקציה במיקום המסוים הזה.
אנו מחשבים את הנגזרת לגבי x עבור הפונקציה f(x) = x2, המספקת f'(x) = 2x. אנו מקבלים את השיפוע ב-x0 בתור 2 * 3 = 6 על ידי החלפת x₀ = 3 בחישוב השיפוע.
שלב 3: עדכון פרמטרים
באמצעות מידע השיפוע, אנו מעדכנים את הערך של x באופן הבא: x = x₀ – α * f'(x₀), כאשר α (אלפא) מציין את קצב הלמידה.
קצב הלמידה הוא היפרפרמטר שקובע את גודלו של כל שלב בתהליך העדכון. הגדרת קצב למידה מתאים היא קריטית מכיוון שקצב למידה איטי עלול לגרום ל אַלגוֹרִיתְם לקחת יותר מדי חזרות כדי להגיע למינימום.
קצב למידה גבוה, לעומת זאת, יכול לגרום לכך שהאלגוריתם יקפיץ או לא יצליח להתכנס. הבה נניח קצב למידה של α = 0.1 לצורך דוגמה זו.
שלב 4: איטרציה
לאחר שיש לנו את הערך המעודכן של x, אנו חוזרים על שלבים 2 ו-3 עבור מספר קבוע מראש של איטרציות או עד שהשינוי ב-x הופך למינימלי, מה שמצביע על התכנסות.
השיטה מחשבת את השיפוע, מעדכנת את הערך של x וממשיכה את ההליך בכל איטרציה, ומאפשרת לו להתקרב למינימום.
שלב 5: התכנסות
הטכניקה מתכנסת לאחר מספר איטרציות לנקודה שבה עדכונים נוספים אינם משפיעים מהותית על ערך הפונקציה.
במקרה שלנו, ככל שהאיטרציות נמשכות, x יתקרב ל-0, שהוא הערך המינימלי של f(x) = x^2. מספר האיטרציות הנחוצות להתכנסות נקבע על ידי גורמים כגון קצב הלמידה שנבחר ומורכבות הפונקציה המיוטבת.
בחירת קצב למידה ()
בחירת שיעור למידה מקובל () היא קריטית לאפקטיביות אלגוריתם הירידה בשיפוע. כפי שצוין קודם לכן, קצב למידה נמוך יכול לגרום להתכנסות איטית, בעוד שקצב למידה גבוה יכול לגרום לחריגת יתר ולכשל בהתכנסות.
מציאת האיזון המתאים היא קריטית כדי להבטיח שהאלגוריתם מתכנס למינימום המיועד בצורה יעילה ככל האפשר.
כוונון קצב הלמידה הוא לרוב הליך של ניסוי וטעייה בפועל. חוקרים ומתרגלים מתנסים באופן שגרתי בשיעורי למידה שונים כדי לראות כיצד הם משפיעים על ההתכנסות של האלגוריתם לאתגר המסוים שלהם.
טיפול בפונקציות לא קמורות
בעוד שלדוגמה הקודמת הייתה פונקציה קמורה פשוטה, בעיות אופטימיזציה רבות בעולם האמיתי כוללות פונקציות לא קמורות עם מינימות מקומיות רבות.
כאשר משתמשים בירידה בשיפוע במקרים כאלה, השיטה יכולה להתכנס למינימום מקומי ולא למינימום הגלובלי.
פותחו מספר צורות מתקדמות של ירידה בשיפוע כדי להתגבר על בעיה זו. ירידה בדרגה סטוקהסטית (SGD) היא שיטה אחת כזו שמציגה אקראיות על ידי בחירת תת-קבוצה אקראית של נקודות נתונים (הידועה כמיני-אצווה) כדי לחשב את הגרדיאנט בכל איטרציה.
דגימה אקראית זו מאפשרת לאלגוריתם להימנע ממינימום מקומיים ולחקור חלקים חדשים בשטח הפונקציה, מה שמגביר את הסיכוי לגלות מינימום טוב יותר.
אדם (Adaptive Moment Estimation) היא וריאציה בולטת נוספת, שהיא גישת אופטימיזציית קצב למידה אדפטיבית המשלבת את היתרונות של RMSprop ושל מומנטום כאחד.
אדם משנה את קצב הלמידה עבור כל פרמטר באופן דינמי על סמך מידע שיפוע קודם, מה שעשוי לגרום להתכנסות טובה יותר לפונקציות לא קמורות.
וריאציות מתוחכמות של ירידה בשיפוע הוכחו כיעילות בטיפול בפונקציות מורכבות יותר ויותר והפכו לכלים סטנדרטיים בלמידת מכונה ולמידה עמוקה, שבהן בעיות אופטימיזציה לא קמורות שכיחות.
שלב 6: דמיינו את ההתקדמות שלכם
בואו נראה את ההתקדמות של אלגוריתם הירידה בשיפוע כדי להבין טוב יותר את התהליך האיטרטיבי שלו. שקול גרף עם ציר x המייצג איטרציות וציר y המייצג את הערך של הפונקציה f(x).
כאשר האלגוריתם חוזר על עצמו, הערך של x מתקרב לאפס, וכתוצאה מכך, ערך הפונקציה יורד עם כל שלב. כשמתווים על גרף, זה יציג מגמת ירידה ברורה, המשקפת את התקדמות האלגוריתם לקראת הגעה למינימום.
שלב 7: כוונון עדין של קצב הלמידה
קצב הלמידה () הוא גורם חשוב בביצועי האלגוריתם. בפועל, קביעת שיעור הלמידה האידיאלי מחייבת לעיתים קרובות ניסוי וטעייה.
כמה טכניקות אופטימיזציה, כגון לוחות זמנים של קצב למידה, יכולות לשנות את קצב הלמידה באופן דינמי במהלך האימון, החל מערך גבוה יותר וצמצום בהדרגה ככל שהאלגוריתם מתקרב להתכנסות.
שיטה זו עוזרת ליצור איזון בין התפתחות מהירה בתחילתו לבין יציבות לקראת סוף תהליך האופטימיזציה.
דוגמה נוספת: מזעור פונקציה ריבועית
בואו נסתכל על דוגמה נוספת כדי לקבל הבנה טובה יותר של ירידה בשיפוע.
שקול את הפונקציה הריבועית הדו-ממדית g(x) = (x – 5)^2. ב-x = 5, גם לפונקציה הזו יש מינימום. כדי למצוא את המינימום הזה, ניישם ירידה בשיפוע.
1. אתחול: נתחיל עם x0 = 8 כנקודת ההתחלה שלנו.
2. חשב את השיפוע של g(x): g'(x) = 2(x – 5). כאשר אנו מחליפים את x0 = 8, השיפוע ב-x0 הוא 2 * (8 - 5) = 6.
3. עם = 0.2 כקצב הלמידה שלנו, אנו מעדכנים את x באופן הבא: x = x₀ – α * g'(x₀) = 8 – 0.2 * 6 = 6.8.
4. חזרה: אנחנו חוזרים על שלבים 2 ו-3 כמה פעמים שצריך עד שמגיעים להתכנסות. כל מחזור מקרב את x ל-5, הערך המינימלי של g(x) = (x – 5)2.
5. התכנסות: השיטה תתכנס בסופו של דבר ל-x = 5, שהוא הערך המינימלי של g(x) = (x – 5)2.
השוואת שיעורי למידה
הבה נשווה את מהירות ההתכנסות של ירידה בשיפוע עבור שיעורי למידה שונים, נניח α = 0.1, α = 0.2, ו-α = 0.5 בדוגמה החדשה שלנו. אנו יכולים לראות ששיעור למידה נמוך יותר (למשל, = 0.1) יביא להתכנסות ארוכה יותר אך למינימום מדויק יותר.
קצב למידה גבוה יותר (לדוגמה, = 0.5) יתכנס מהר יותר, אך יכול לעלות או להתנודד בערך המינימום, וכתוצאה מכך דיוק גרוע יותר.
דוגמה רב-מודאלית לטיפול בפונקציות לא קמורות
קחו בחשבון את h(x) = sin(x) + 0.5x, פונקציה לא קמורה.
יש כמה מינימות ומקסימום מקומיים עבור פונקציה זו. בהתאם לעמדת ההתחלה וקצב הלמידה, נוכל להתכנס לכל אחד מהמינימום המקומי באמצעות ירידה שיפועית סטנדרטית.
אנו יכולים לפתור זאת על ידי שימוש בטכניקות אופטימיזציה מתקדמות יותר כמו אדם או ירידה סטוכסטית (SGD). שיטות אלו משתמשות בשיעורי למידה אדפטיבית או בדגימה אקראית כדי לחקור אזורים שונים בנוף הפונקציה, מה שמגדיל את הסבירות להשגת מינימום טוב יותר.
סיכום
אלגוריתמי ירידה בשיפוע הם כלי אופטימיזציה רבי עוצמה שנמצאים בשימוש נרחב במגוון רחב של תעשיות. הם מגלים את הנמוך ביותר (או המקסימלי) של פונקציה על ידי עדכון איטרטיבי של פרמטרים בהתבסס על כיוון השיפוע.
בגלל האופי האיטרטיבי של האלגוריתם, הוא יכול להתמודד עם מרחבים במימד גבוה ופונקציות מורכבות, מה שהופך אותו לחיוני בלמידת מכונה ועיבוד נתונים.
ירידה בשיפוע יכולה להתמודד בקלות עם קשיים בעולם האמיתי ולתרום רבות לצמיחת הטכנולוגיה וקבלת החלטות מונעת נתונים על ידי בחירה קפדנית של קצב הלמידה ויישום וריאציות מתקדמות כגון ירידה בשיפוע סטוכסטי ואדם.




השאירו תגובה