Table of Contents[Hide][Show]
Yuav ua li cas rau lub siab thaum koj hnov lo lus "robots"? Cov neeg feem coob yuav pom lub tshuab hlau uas khiav ntawm hluav taws xob. Txawm hais tias muaj ntau qhov kev nce qib tau ua kom ua tiav cov hom neeg hlau feem ntau pom hauv kev tshawb fawb tsis tseeb, muaj lwm ceg ntawm cov neeg hlau uas yuav ua rau koj xav tsis thoob.
Ob peb xyoos dhau los pom muaj kev txaus siab rau cov neeg ua haujlwm mos mos. Cov hom neeg hlau no tuaj yeem ua tiav ntau txoj hauv kev. Txawm li cas los xij, lub ntsiab lus tseem ceeb yog kev siv cov ntaub ntawv elastic los tsim cov neeg hlau uas muaj kev nyab xeeb thiab yoog raws ntau yam ntsiab lus.
Cov tsoos rigid-bodied robots, xws li qhov koj yuav pom hauv lub Hoobkas semi-automated, feem ntau tsis zoo rau qee qhov chaw. Cov hom neeg hlau no feem ntau vam khom cov kev txav thiab cov algorithms los tiv thaiv kev sib tsoo. Cov khoom siv kuj yuav ua rau nws txaus ntshai thaum siv nyob ze tib neeg.
Muaj ntau lub chaw tshawb fawb thoob ntiaj teb uas tab tom sim tsim cov neeg hlau zoo tshaj plaws-lub cev.
Hauv qhov blog no, peb yuav saib qhov kev txhim kho tsis ntev los no los ntawm Suav University of Hong Kong - lub npe hu ua magnetic slime robot. Peb tseem yuav tshawb nrhiav cov kev siv tswv yim ntawm cov cuab yeej tshiab thiab nws cov kev txwv tam sim no.
Soft Robotics yog dab tsi?
Mos robotics yog subfield ntawm cov neeg hlau uas lub hom phiaj tsim thiab tsim cov neeg hlau uas muaj cov ntaub ntawv ua raws.
Peb txhais li cas los ntawm kev ua raws cai? Lo lus "ua raws" nyob rau hauv mechanical engineering yog hais txog ib hom kev ua haujlwm uas ua tiav kev txav los ntawm elastic deformation. Qhov no yog qhov sib txawv ntawm lub cev nruj uas koj yuav pom hauv cov neeg hlau tam sim no.
Txawm hais tias muaj ntau lub cev nqaij daim tawv siv cov khoom muag muag, kev tshawb fawb hauv cov neeg hlau mos feem ntau yog tsom rau lub tshuab muag muag.
Tej zaum koj yuav xav tsis thoob li cas tus neeg hlau mos yuav txav mus. Cov kws tshawb fawb yuav tsum tau tsim txoj hauv kev tshiab los tswj cov neeg hlau mos uas tsis muaj hlau thav duab ntau hauv ntau cov neeg hlau nruj.
Qee cov kws tshawb fawb siv electrostatic quab yuam los hloov cov duab ntawm cov khoom. Lwm cov neeg hlau mos siv cov polymers tshwj xeeb uas tuaj yeem hloov cov duab thaum tshav kub kub nkag rau cov khoom siv. Cov ntaub ntawv no yuav nco ntsoov lawv cov duab qub txawm tias tom qab ntau qhov kub hloov pauv.
Siv Magnetic Actuation
Cov kws tshawb fawb kuj tau saib mus rau hauv kev tsim cov neeg hlau mos uas muaj hlau nplaum ua kom muaj zog. Cov kws tshawb fawb los ntawm Suav University of Hong Kong yog cov tho kev a daim ntawv tshiab ntawm soft-bodied robots uas siv cov hlau nplaum los tswj cov dej tsis-Newtonian "slime" neeg hlau.
Cov kws tshawb fawb tau sim siv ntau hom khoom los ntawm kev tshawb fawb yav dhau los ntawm cov hlau nplaum mos-bodied robots.
Kev tshawb fawb ua ntej siv silicone lossis ferrofluid uas tuaj nrog lawv cov kev txwv. Elastomer-raws li lossis silicone mos robots muaj kev txwv deformability thaum ferrofluid tau suav tias tsis ruaj khov rau ntau qhov kev siv.
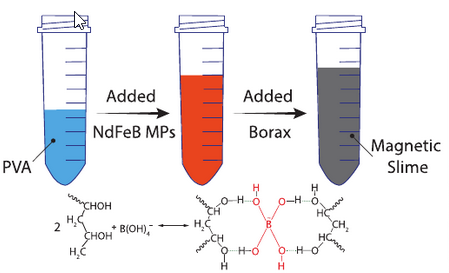
Cov kws tshawb fawb Hong Kong tau tsim cov slime ua los ntawm kev sib xyaw ntawm polyvinyl cawv (PVA) thiab borax. Sib xyaw rau hauv cov kua dej yog cov khoom sib nqus me me uas tso cai rau cov kws tshawb fawb los tswj cov kua dej uas siv cov hlau nplaum sib nqus.

Cov kua dej uas tsis yog-Newtonian muaj cov khoom kho tus kheej uas tso cai rau cov neeg hlau txuas nrog lwm qhov sib cais thiab sib xyaw ua ke.
Daim ntawv thov thiab kev txwv
Cov neeg hlau muaj peev xwm taug kev los ntawm txoj kab nqaim tau ua rau qee qhov ua tau daim ntawv thov hauv kev kho mob.
Piv txwv li, tus neeg hlau slime tuaj yeem noj los ntawm tib neeg thiab siv los rho tawm cov khoom tsim kev puas tsuaj yam tsis muaj kev phais.
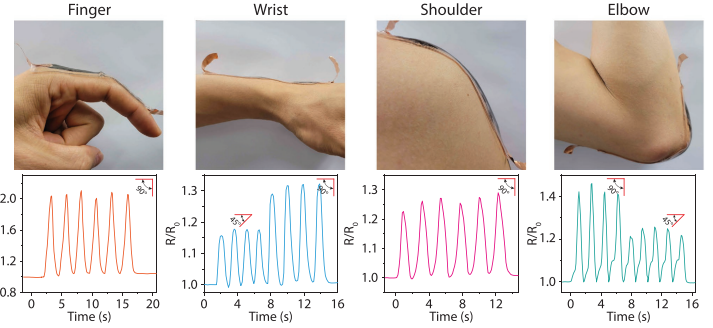
Cov kws tshawb fawb kuj tau pom nyob rau hauv lawv daim ntawv tias cov kua dej siv kuj yog cov conductive. Qhov no txhais tau hais tias cov hlau nplaum nplaum tuaj yeem ua raws li kev hloov pauv hauv Circuit Court thiab tejzaum nws yog ib txoj hauv kev kho cov kab hluav taws xob puas.
Magnetic slime tuaj yeem ua raws li cov lus tsa suab sensor uas tuaj yeem hloov kho mus rau qhov khoov thiab cov khoom siv hluav taws xob zoo.
Thaum cog lus tseg, tag nrho cov ntawv thov no tseem yog cov lus pom zoo tshaj plaws thiab kev tshawb fawb ntxiv yuav tsum tau ua los txhim kho cov neeg hlau slime kev ua tau zoo.
Cov kws tshawb fawb tau sau tseg tias slime nws tus kheej yog tshuaj lom thiab tam sim no tsis haum rau kev siv hauv tib neeg lub cev. Cov khoom sib nqus uas tswj cov slime ua rau cov slime neeg hlau muaj tshuaj lom. Cov kws tshawb fawb xav tau ntxiv ib txheej ntawm silica txheej los ua kom cov slime muaj kev nyab xeeb siv.
xaus
Kev lag luam ntawm cov neeg hlau mos tseem yog qhov tshiab, tab sis twb qhia ntau yam kev cog lus. Kev siv lub cev mos ntawm cov neeg hlau hauv kev kho mob thiab kev phais mob tuaj yeem ua rau muaj sia nyob ntau dua. Lub tswv yim ntawm kev hnav khaub ncaws mos tuaj yeem pab cov neeg xiam oob khab.
Kuv txawm xav tsis thoob tias cov kws tshawb fawb NASA tau pib ua tsim soft-bodied robots los pab cov astronauts nyob nyab xeeb thaum lub orbit.
Vam tias, kev tshawb fawb ntau ntxiv yuav qhib lub peev xwm ntawm cov neeg ua haujlwm mos mos hauv lub ntiaj teb uas tib neeg tau tso siab rau ntau thiab ntau dua rau cov tshuab.
Koj xav li cas txog yav tom ntej ntawm cov neeg hlau mos?



Sau ntawv cia Ncua