Índice analítico[Ocultar][Mostrar]
Que che vén á mente cando escoitas a palabra "robótica"? A maioría da xente imaxinaría unha máquina metálica que funciona con electricidade. Aínda que se están facendo moitos avances para conseguir os tipos de robots que se ven habitualmente na ciencia ficción, hai outra rama da robótica que pode sorprenderte.
Os últimos anos viu un aumento do interese pola robótica de corpo brando. Este tipo de robots pódense conseguir de diferentes xeitos. Non obstante, o tema común é o uso de materiais elásticos para crear robots seguros e adaptables a diversos contextos.
Os robots tradicionais de corpo ríxido, como o que podes atopar nunha fábrica semiautomatizada, moitas veces non son ben axeitados para certos ambientes. Este tipo de robots adoitan depender de movementos e algoritmos precisos para evitar colisións. O material utilizado tamén pode facelo perigoso cando se usa preto de humanos.
Hai moitos laboratorios de investigación en todo o mundo que están tentando crear o robot de corpos brandos ideal.
Neste blog, botaremos unha ollada a un desenvolvemento recente da Universidade chinesa de Hong Kong: o chamado robot de lodo magnético. Tamén exploraremos as aplicacións prácticas da nova tecnoloxía e as súas limitacións actuais.
Que é a robótica suave?
A robótica suave é un subcampo da robótica que ten como obxectivo deseñar e desenvolver robots que estean compostos por materiais compatibles.
Que entendemos por cumpridor? O termo "conforme" en enxeñaría mecánica refírese a un tipo de mecanismo que consegue o movemento mediante a deformación elástica. Isto contrasta cos corpos ríxidos típicos que podes ver nos robots actuais.
Aínda que moitos robots de corpo ríxido usan compoñentes brandos estratexicamente, a investigación en robótica branda xeralmente ten como obxectivo unha máquina totalmente branda.
Podes estar a preguntar como se movería un robot brando. Os investigadores tiveron que idear novas formas de controlar robots brandos sen o marco metálico común en moitos robots ríxidos.
Algúns investigadores usan forza electrostática para cambiar a forma dos materiais. Outros robots brandos usan polímeros especiais que poden cambiar de forma cando se introduce calor no material. Estes materiais lembrarán a súa forma orixinal mesmo despois de moitos cambios de temperatura.
Usando accionamento magnético
Os investigadores tamén buscaron crear robots brandos que se accionen magnéticamente. Os investigadores da Universidade Chinesa de Hong Kong son pioneiros a nova forma de robots de corpo brando que usan imáns para controlar un robot "slime" baseado en fluídos non newtonianos.
Os investigadores intentaron utilizar un tipo de material diferente da investigación previa sobre robots magnéticos de corpo brando.
Investigacións anteriores usaban silicona ou ferrofluido que viña coas súas limitacións. Os robots brandos a base de elastómeros ou de silicona tiñan unha deformabilidade limitada mentres que o ferrofluido considerábase demasiado inestable para moitos casos de uso.
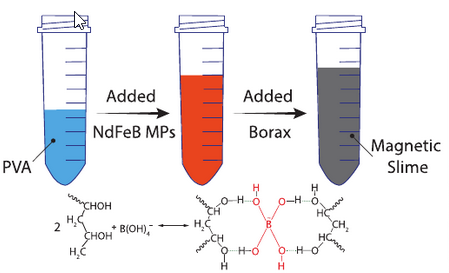
Os investigadores de Hong Kong crearon un limo feito a partir dunha mestura de alcohol polivinílico (PVA) e bórax. Mesturadas no fluído hai pequenas partículas magnéticas que permitiron aos investigadores manipular o fluído mediante un campo magnético.

O fluído non newtoniano tiña propiedades de autocuración que permitían ao robot conectarse con outras partes separadas e combinarse nun todo.
Aplicacións e limitacións
A capacidade do robot para navegar por canles estreitas levou a algúns posibles aplicacións no ámbito da saúde.
Por exemplo, o robot de limo podería ser inxerido por un humano e usado para extraer obxectos daniños sen cirurxía.
Os investigadores tamén demostraron no seu traballo que o fluído utilizado tamén é condutor. Isto significa que o limo magnético pode actuar como un interruptor de circuíto e posiblemente como un medio para reparar os circuítos danados.
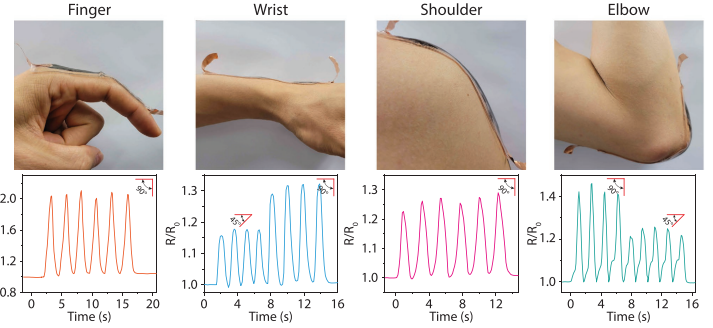
O limo magnético podería actuar como un sensor de movemento que pode adaptarse a ambientes mecánicos dinámicos e dobrados.
Aínda que son prometedoras, todas estas aplicacións seguen sendo propostas no mellor dos casos e haberá que facer máis investigación para mellorar aínda máis o rendemento do robot de lodo.
Os investigadores observaron que o limo en si é tóxico e actualmente non é apto para o seu uso no corpo humano. As partículas magnéticas que controlan o limo fan que o robot de limo sexa tóxico. Os investigadores necesitaron engadir unha capa de revestimento de sílice para que o limo sexa seguro de usar.
Conclusión
O campo da robótica branda aínda é relativamente novo, pero xa mostra moitas promesas. O uso potencial de robots de corpo brando en aplicacións médicas e cirúrxicas podería levar a salvar máis vidas. A idea de robots brandos e portátiles podería axudar ás persoas con discapacidade.
Ata me sorprendeu que os científicos da NASA comezasen a facelo desenvolver robots de corpo brando para axudar aos astronautas a manterse a salvo durante a órbita.
Con sorte, máis investigación desbloquee todo o potencial da robótica de corpo brando nun mundo onde os humanos depositan cada vez máis confianza nas máquinas.
Que opinas do futuro da robótica branda?



Deixe unha resposta