Table des matières[Cacher][Montrer]
Qu'est-ce qui vous vient à l'esprit lorsque vous entendez le mot « robotique » ? La plupart des gens imagineraient une machine métallique qui fonctionne à l'électricité. Alors que de nombreux progrès sont réalisés pour réaliser les types de robots couramment vus dans la science-fiction, il existe une autre branche de la robotique qui pourrait vous surprendre.
Ces dernières années ont vu un intérêt croissant pour la robotique des corps mous. Ces types de robots peuvent être réalisés de différentes manières. Cependant, le thème commun est l'utilisation de matériaux élastiques pour créer des robots à la fois sûrs et adaptables dans une variété de contextes.
Les robots traditionnels à corps rigide, tels que ceux que vous pourriez trouver dans une usine semi-automatisée, ne sont souvent pas bien adaptés à certains environnements. Ces types de robots reposent généralement sur des mouvements et des algorithmes précis pour éviter les collisions. Le matériau utilisé peut également le rendre dangereux lorsqu'il est utilisé à proximité des humains.
De nombreux laboratoires de recherche dans le monde tentent de créer le robot à corps mou idéal.
Dans ce blog, nous allons jeter un œil à un développement récent de l'Université chinoise de Hong Kong - le soi-disant robot slime magnétique. Nous explorerons également les applications pratiques de la nouvelle technologie et ses limites actuelles.
Qu'est-ce que la robotique douce ?
La robotique douce est un sous-domaine de la robotique qui vise à concevoir et développer des robots composés de matériaux conformes.
Qu'entend-on par conforme ? Le terme «conforme» en génie mécanique fait référence à un type de mécanisme qui réalise un mouvement par déformation élastique. Cela contraste avec les corps rigides typiques que vous pourriez voir dans les robots actuels.
Alors que de nombreux robots à corps rigide utilisent stratégiquement des composants souples, la recherche en robotique souple vise généralement une machine entièrement souple.
Vous vous demandez peut-être comment un robot mou se déplacerait. Les chercheurs ont dû concevoir de nouvelles façons de contrôler les robots mous sans le cadre métallique commun à de nombreux robots rigides.
Certains chercheurs utilisent la force électrostatique pour modifier la forme des matériaux. D'autres robots mous utilisent des polymères spéciaux qui peuvent changer de forme lorsque la chaleur est introduite dans le matériau. Ces matériaux se souviendront de leur forme d'origine même après de nombreux changements de température.
Utilisation de l'actionnement magnétique
Les chercheurs se sont également penchés sur la création de robots mous actionnés magnétiquement. Des chercheurs de l'Université chinoise de Hong Kong sont les pionniers d'un nouvelle forme de robots à corps mou qui utilisent des aimants pour contrôler un robot "slime" à base de fluide non newtonien.
Les chercheurs ont essayé d'utiliser un type de matériau différent des recherches précédentes sur les robots magnétiques à corps mou.
Des recherches antérieures utilisaient du silicone ou du ferrofluide qui venait avec leurs limites. Les robots souples à base d'élastomère ou de silicone avaient une déformabilité limitée tandis que le ferrofluide était jugé trop instable pour de nombreux cas d'utilisation.
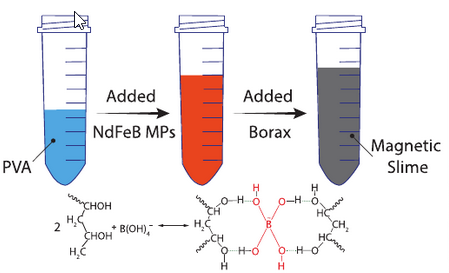
Les chercheurs de Hong Kong ont créé un slime à base d'un mélange d'alcool polyvinylique (PVA) et de borax. De minuscules particules magnétiques sont mélangées au fluide, ce qui a permis aux chercheurs de manipuler le fluide à l'aide d'un champ magnétique.

Le fluide non newtonien avait des propriétés d'auto-guérison qui permettaient au robot de se connecter à d'autres parties séparées et de se combiner en un tout.
Applications et limites
La capacité du robot à naviguer dans des canaux étroits a conduit à des possibilités applications dans le domaine de la santé.
Par exemple, le robot visqueux pourrait être ingéré par un humain et utilisé pour extraire des objets nocifs sans recours à la chirurgie.
Les chercheurs ont également montré dans leur article que le fluide utilisé est également conducteur. Cela signifie que la boue magnétique peut agir comme un interrupteur de circuit et éventuellement comme un moyen de réparer les circuits endommagés.
La boue magnétique pourrait agir comme un capteur de mouvement qui peut s'adapter à la flexion et aux environnements mécaniques dynamiques.
Bien que prometteuses, toutes ces applications sont encore au mieux des propositions et des recherches supplémentaires devront être menées pour améliorer encore les performances du robot slime.
Les chercheurs ont noté que la boue elle-même est toxique et ne convient actuellement pas à une utilisation dans le corps humain. Les particules magnétiques qui contrôlent le slime rendent le robot slime toxique. Les chercheurs devaient ajouter une couche de revêtement de silice pour rendre l'utilisation de la boue sûre.
Conclusion
Le domaine de la robotique douce est encore relativement nouveau, mais s'annonce déjà très prometteur. L'utilisation potentielle de robots à corps mou dans des applications médicales et chirurgicales pourrait permettre de sauver davantage de vies. L'idée de robots mous portables pourrait potentiellement aider les personnes handicapées.
J'ai même été étonné que les scientifiques de la NASA aient commencé à développer robots à corps mou pour aider les astronautes à rester en sécurité pendant l'orbite.
Espérons que davantage de recherches permettront de libérer tout le potentiel de la robotique à corps mou dans un monde où les humains font de plus en plus confiance aux machines.
Que pensez-vous du futur de la robotique douce ?



Soyez sympa! Laissez un commentaire