In vielen realen Situationen stehen wir vor Optimierungsproblemen, wenn wir das Minimum oder Maximum einer Funktion ermitteln müssen.
Stellen Sie sich eine Funktion als mathematische Darstellung eines Systems vor, und die Bestimmung ihres Minimums oder Maximums kann für eine Vielzahl von Anwendungen wie maschinelles Lernen, Ingenieurwesen, Finanzen und andere von entscheidender Bedeutung sein.
Stellen Sie sich eine Landschaft mit Hügeln und Tälern vor. Unser Ziel ist es, den tiefsten Punkt (Minimum) zu finden, um so schnell wie möglich an unser Ziel zu gelangen.
Wir verwenden häufig Gradientenabstiegsalgorithmen, um solche Optimierungsherausforderungen zu lösen. Bei diesen Algorithmen handelt es sich um iterative Optimierungsmethoden zur Minimierung einer Funktion durch Schritte in Richtung des steilsten Abfalls (negativer Gradient).
Der Gradient spiegelt die Richtung mit dem steilsten Anstieg der Funktion wider, und die Fahrt in die entgegengesetzte Richtung führt uns zum Minimum.
Was genau ist der Gradient Descent-Algorithmus?
Der Gradientenabstieg ist ein beliebter iterativer Optimierungsansatz zur Bestimmung des Minimums (oder Maximums) einer Funktion.
Es ist ein wichtiges Werkzeug in mehreren Bereichen, darunter Maschinelles Lernen, Deep Learning, künstliche Intelligenz, Ingenieurwesen und Finanzen.
Das Grundprinzip des Algorithmus basiert auf der Verwendung des Gradienten, der die Richtung des stärksten Anstiegs des Funktionswerts anzeigt.
Der Algorithmus navigiert die Landschaft der Funktion effizient in Richtung des Minimums, indem er wiederholt Schritte in die entgegengesetzte Richtung des Gradienten ausführt und die Lösung iterativ bis zur Konvergenz verfeinert.
Warum verwenden wir Gradientenabstiegsalgorithmen?
Erstens können sie zur Lösung einer Vielzahl von Optimierungsproblemen eingesetzt werden, darunter auch solche mit hochdimensionalen Räumen und komplexen Funktionen.
Zweitens können sie schnell optimale Lösungen finden, insbesondere wenn die analytische Lösung nicht verfügbar oder rechenintensiv ist.
Gradientenabstiegstechniken sind hoch skalierbar und können große Datenmengen erfolgreich verarbeiten.
Daher werden sie häufig verwendet Algorithmen für maschinelles Lernen wie das Training neuronaler Netze, um aus Daten zu lernen und ihre Parameter zu ändern, um Vorhersagefehler zu minimieren.
Ein detailliertes Beispiel für Gradientenabstiegsschritte
Schauen wir uns ein detaillierteres Beispiel an, um die Gradientenabstiegstechnik besser zu verstehen.
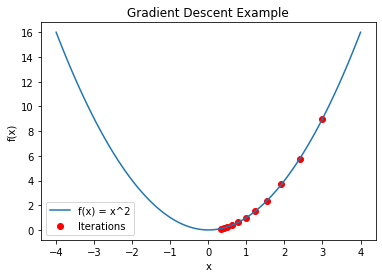
Betrachten Sie die 2D-Funktion f(x) = x2, die eine grundlegende Parabelkurve mit einem Minimum bei (0,0) erzeugt. Zur Bestimmung dieses Minimalpunkts wird der Gradientenabstiegsalgorithmus verwendet.
Schritt 1: Initialisierung
Der Gradientenabstiegsalgorithmus beginnt mit der Initialisierung des Werts der Variablen x, dargestellt als x0.
Der Anfangswert kann einen erheblichen Einfluss auf die Leistung des Algorithmus haben.
Zufällige Initialisierung oder die Nutzung von Vorkenntnissen über das Problem sind zwei gängige Techniken. Nehmen Sie an, dass x₀ = 3 zu Beginn unseres Falles ist.
Schritt 2: Berechnen Sie den Gradienten
Der Gradient der Funktion f(x) an der aktuellen Position x₀. muss dann berechnet werden.
Der Gradient gibt die Steigung oder Änderungsrate der Funktion an dieser bestimmten Position an.
Wir berechnen die Ableitung nach x für die Funktion f(x) = x2, die f'(x) = 2x ergibt. Wir erhalten den Gradienten bei x0 als 2 * 3 = 6, indem wir x₀ = 3 in die Gradientenberechnung einsetzen.
Schritt 3: Parameter aktualisieren
Mithilfe der Gradienteninformationen aktualisieren wir den Wert von x wie folgt: x = x₀ – α * f'(x₀), wobei α (Alpha) die Lernrate bezeichnet.
Die Lernrate ist ein Hyperparameter, der die Größe jedes Schritts im Aktualisierungsprozess bestimmt. Das Festlegen einer angemessenen Lernrate ist von entscheidender Bedeutung, da eine langsame Lernrate dazu führen kann Algorithmus zu viele Wiederholungen machen, um das Minimum zu erreichen.
Eine hohe Lernrate kann andererseits dazu führen, dass der Algorithmus abprallt oder nicht konvergiert. Nehmen wir für dieses Beispiel eine Lernrate von α = 0.1 an.
Schritt 4: Iterieren
Nachdem wir den aktualisierten Wert von x haben, wiederholen wir die Schritte 2 und 3 für eine vorgegebene Anzahl von Iterationen oder bis die Änderung von x minimal wird, was Konvergenz anzeigt.
Die Methode berechnet den Gradienten, aktualisiert den Wert von x und setzt den Vorgang bei jeder Iteration fort, sodass er näher an das Minimum herankommt.
Schritt 5: Konvergenz
Die Technik konvergiert nach einigen Iterationen zu einem Punkt, an dem weitere Aktualisierungen keinen wesentlichen Einfluss auf den Wert der Funktion haben.
In unserem Fall nähert sich x im weiteren Verlauf der Iterationen 0, was dem Mindestwert von f(x) = x^2 entspricht. Die Anzahl der für die Konvergenz erforderlichen Iterationen wird durch Faktoren wie die gewählte Lernrate und die Komplexität der zu optimierenden Funktion bestimmt.
Auswahl einer Lernrate ()
Die Wahl einer akzeptablen Lernrate () ist entscheidend für die Wirksamkeit des Gradientenabstiegsalgorithmus. Wie bereits erwähnt, kann eine niedrige Lernrate zu einer langsamen Konvergenz führen, wohingegen eine hohe Lernrate zu einem Überschießen und einem Scheitern der Konvergenz führen kann.
Das Finden des richtigen Gleichgewichts ist entscheidend, um sicherzustellen, dass der Algorithmus so effizient wie möglich dem beabsichtigten Minimum konvergiert.
Die Optimierung der Lernrate ist in der Praxis häufig ein Versuch-und-Irrtum-Verfahren. Forscher und Praktiker experimentieren regelmäßig mit unterschiedlichen Lernraten, um zu sehen, wie sie sich auf die Konvergenz des Algorithmus bei ihrer jeweiligen Herausforderung auswirken.
Umgang mit nichtkonvexen Funktionen
Während das vorherige Beispiel eine einfache konvexe Funktion hatte, betreffen viele Optimierungsprobleme in der realen Welt nichtkonvexe Funktionen mit vielen lokalen Minima.
Wenn in solchen Fällen der Gradientenabstieg verwendet wird, kann die Methode eher zu einem lokalen Minimum als zum globalen Minimum konvergieren.
Um dieses Problem zu lösen, wurden mehrere fortschrittliche Formen des Gradientenabstiegs entwickelt. Stochastic Gradient Descent (SGD) ist eine solche Methode, die Zufälligkeit einführt, indem sie eine zufällige Teilmenge von Datenpunkten (bekannt als Mini-Batch) auswählt, um den Gradienten bei jeder Iteration zu berechnen.
Diese Zufallsstichprobe ermöglicht es dem Algorithmus, lokale Minima zu vermeiden und neue Teile des Geländes der Funktion zu erkunden, wodurch die Wahrscheinlichkeit erhöht wird, ein besseres Minimum zu entdecken.
Adam (Adaptive Moment Estimation) ist eine weitere herausragende Variante, bei der es sich um einen Ansatz zur adaptiven Lernratenoptimierung handelt, der die Vorteile von RMSprop und Momentum vereint.
Adam ändert die Lernrate für jeden Parameter dynamisch basierend auf vorherigen Gradienteninformationen, was zu einer besseren Konvergenz bei nicht konvexen Funktionen führen kann.
Diese ausgeklügelten Gradientenabstiegsvariationen haben sich bei der Handhabung immer komplexerer Funktionen als effektiv erwiesen und sind zu Standardwerkzeugen beim maschinellen Lernen und Deep Learning geworden, wo nicht-konvexe Optimierungsprobleme häufig auftreten.
Schritt 6: Visualisieren Sie Ihren Fortschritt
Sehen wir uns den Fortschritt des Gradientenabstiegsalgorithmus an, um seinen iterativen Prozess besser zu verstehen. Betrachten Sie einen Graphen mit einer x-Achse, die Iterationen darstellt, und einer y-Achse, die den Wert der Funktion f(x) darstellt.
Während der Algorithmus iteriert, nähert sich der Wert von x Null und infolgedessen sinkt der Funktionswert mit jedem Schritt. In einem Diagramm dargestellt würde dies einen deutlich abnehmenden Trend zeigen, der den Fortschritt des Algorithmus in Richtung Erreichen des Minimums widerspiegelt.
Schritt 7: Feinabstimmung der Lernrate
Die Lernrate () ist ein wichtiger Faktor für die Leistung des Algorithmus. In der Praxis erfordert die Bestimmung der idealen Lernrate häufig Versuch und Irrtum.
Einige Optimierungstechniken, wie z. B. Lernratenpläne, können die Lernrate während des Trainings dynamisch ändern, indem sie mit einem höheren Wert beginnen und ihn schrittweise verringern, wenn sich der Algorithmus der Konvergenz nähert.
Diese Methode trägt dazu bei, ein Gleichgewicht zwischen schneller Entwicklung am Anfang und Stabilität am Ende des Optimierungsprozesses zu finden.
Ein weiteres Beispiel: Minimierung einer quadratischen Funktion
Schauen wir uns ein weiteres Beispiel an, um den Gradientenabstieg besser zu verstehen.
Betrachten Sie die zweidimensionale quadratische Funktion g(x) = (x – 5)^2. Bei x = 5 hat diese Funktion ebenfalls ein Minimum. Um dieses Minimum zu finden, wenden wir den Gradientenabstieg an.
1. Initialisierung: Beginnen wir mit x0 = 8 als Ausgangspunkt.
2. Berechnen Sie den Gradienten von g(x): g'(x) = 2(x – 5). Wenn wir x0 = 8 einsetzen, beträgt der Gradient bei x0 2 * (8 – 5) = 6.
3. Mit = 0.2 als unserer Lernrate aktualisieren wir x wie folgt: x = x₀ – α * g'(x₀) = 8 – 0.2 * 6 = 6.8.
4. Iterieren: Wir wiederholen die Schritte 2 und 3 so oft wie nötig, bis Konvergenz erreicht ist. Jeder Zyklus bringt x näher an 5, den Minimalwert von g(x) = (x – 5)2.
5. Konvergenz: Die Methode konvergiert schließlich gegen x = 5, was dem Minimalwert von g(x) = (x – 5)2 entspricht.
Vergleich der Lernraten
Vergleichen wir die Konvergenzgeschwindigkeit des Gradientenabstiegs für verschiedene Lernraten, sagen wir α = 0.1, α = 0.2 und α = 0.5 in unserem neuen Beispiel. Wir können sehen, dass eine niedrigere Lernrate (z. B. = 0.1) zu einer längeren Konvergenz, aber einem genaueren Minimum führt.
Eine höhere Lernrate (z. B. = 0.5) führt zu einer schnelleren Konvergenz, kann aber über das Minimum hinausschießen oder schwanken, was zu einer schlechteren Genauigkeit führt.
Ein multimodales Beispiel für die Handhabung nichtkonvexer Funktionen
Betrachten Sie h(x) = sin(x) + 0.5x, eine nicht konvexe Funktion.
Für diese Funktion gibt es mehrere lokale Minima und Maxima. Abhängig von der Ausgangsposition und der Lernrate könnten wir mithilfe des Standardgradientenabstiegs zu jedem der lokalen Minima konvergieren.
Wir können dieses Problem lösen, indem wir fortschrittlichere Optimierungstechniken wie Adam oder den stochastischen Gradientenabstieg (SGD) verwenden. Diese Methoden nutzen adaptive Lernraten oder Zufallsstichproben, um verschiedene Bereiche der Funktionslandschaft zu erkunden und erhöhen so die Wahrscheinlichkeit, ein besseres Minimum zu erreichen.
Zusammenfassung
Gradientenabstiegsalgorithmen sind leistungsstarke Optimierungswerkzeuge, die in einer Vielzahl von Branchen weit verbreitet sind. Sie ermitteln den niedrigsten (oder höchsten) Wert einer Funktion, indem sie Parameter basierend auf der Richtung des Gradienten iterativ aktualisieren.
Aufgrund der iterativen Natur des Algorithmus kann er hochdimensionale Räume und komplexe Funktionen verarbeiten, was ihn für maschinelles Lernen und Datenverarbeitung unverzichtbar macht.
Durch die sorgfältige Auswahl der Lernrate und die Anwendung fortgeschrittener Variationen wie stochastischer Gradientenabstieg und Adam kann der Gradientenabstieg problemlos reale Schwierigkeiten bewältigen und erheblich zum Wachstum der Technologie und datengesteuerten Entscheidungsfindung beitragen.




Hinterlassen Sie uns einen Kommentar