Indholdsfortegnelse[Skjule][At vise]
Hvad tænker du på, når du hører ordet "robotik"? De fleste mennesker ville forestille sig en metalmaskine, der kører på elektricitet. Mens der gøres mange fremskridt for at opnå de typer robotter, der almindeligvis ses i science fiction, er der en anden gren af robotteknologi, der kan overraske dig.
I de sidste par år har der været en stigning i interessen for robotter med blød krop. Disse typer robotter kan opnås på forskellige måder. Men det fælles tema er brugen af elastiske materialer til at skabe robotter, der både er sikre og tilpasningsdygtige i en række forskellige sammenhænge.
Traditionelle robotter med stiv krop, såsom hvad du kan finde på en semi-automatiseret fabrik, er ofte ikke velegnet til visse miljøer. Disse typer robotter er normalt afhængige af præcise bevægelser og algoritmer for at forhindre kollisioner. Det anvendte materiale kan også gøre det farligt, når det bruges i nærheden af mennesker.
Der er mange forskningslaboratorier verden over, der forsøger at skabe den ideelle robot med bløde kroppe.
I denne blog tager vi et kig på en nylig udvikling fra det kinesiske universitet i Hong Kong – den såkaldte magnetiske slimrobot. Vi vil også undersøge de praktiske anvendelser af den nye teknologi og dens nuværende begrænsninger.
Hvad er Soft Robotics?
Soft robotics er et underområde af robotteknologi, der har til formål at designe og udvikle robotter, der er sammensat af kompatible materialer.
Hvad mener vi med compliant? Udtrykket "kompatibelt" i maskinteknik refererer til en type mekanisme, der opnår bevægelse gennem elastisk deformation. Dette er i modsætning til de typiske stive kroppe, som du måske ser i nuværende robotter.
Mens mange robotter med stiv krop bruger bløde komponenter strategisk, sigter forskning i blød robotik generelt efter en fuldblød maskine.
Du undrer dig måske over, hvordan en blød robot ville bevæge sig. Forskere måtte udtænke nye måder at styre bløde robotter uden den metalramme, der er almindelig i mange stive robotter.
Nogle forskere bruger elektrostatisk kraft til at ændre formen på materialer. Andre bløde robotter bruger specielle polymerer, der kan ændre form, når varme indføres i materialet. Disse materialer vil huske deres oprindelige form selv efter mange temperaturændringer.
Brug af magnetisk aktivering
Forskere har også undersøgt at skabe bløde robotter, der aktiveres magnetisk. Forskere fra det kinesiske universitet i Hong Kong er banebrydende for en ny form for bløde robotter der bruger magneter til at styre en ikke-newtonsk væskebaseret "slim"-robot.
Forskerne forsøgte at bruge en anden type materiale end tidligere forskning på magnetiske bløde robotter.
Tidligere forskning brugte silikone eller ferrofluid, som kom med deres begrænsninger. Elastomerbaserede eller silikonebløde robotter havde begrænset deformerbarhed, mens ferrofluid blev anset for at være for ustabilt til mange anvendelsestilfælde.
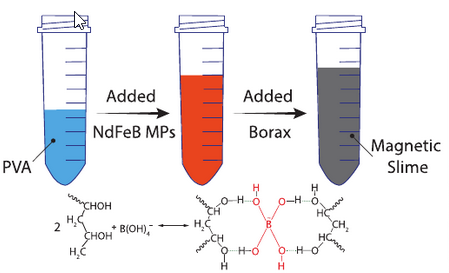
Hong Kong-forskerne skabte et slim lavet af en blanding af polyvinylalkohol (PVA) og borax. Blandet i væsken er små magnetiske partikler, der gjorde det muligt for forskerne at manipulere væsken ved hjælp af et magnetfelt.

Den ikke-newtonske væske havde selvhelbredende egenskaber, der gjorde det muligt for robotten at forbinde med andre separate dele og kombinere til en helhed.
Anvendelser og begrænsninger
Robottens evne til at navigere gennem smalle kanaler har ført til nogle evt applikationer inden for sundhedsområdet.
For eksempel kunne slimrobotten indtages af et menneske og bruges til at udvinde skadelige genstande uden brug af kirurgi.
Forskerne har også vist i deres papir, at den anvendte væske også er ledende. Det betyder, at det magnetiske slim kan fungere som en kredsløbsafbryder og muligvis som et middel til at reparere beskadigede kredsløb.
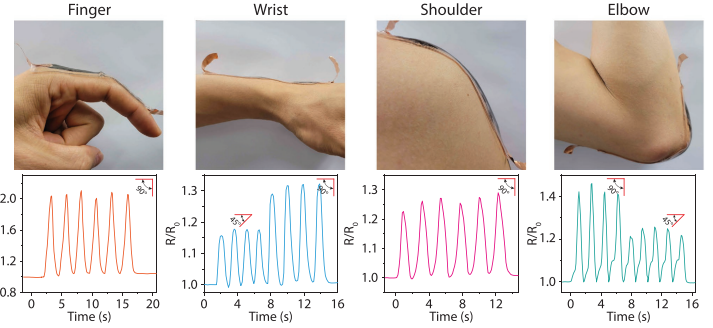
Det magnetiske slim kan fungere som en bevægelsessensor, der kan tilpasse sig bøjning og dynamiske mekaniske miljøer.
Selvom de lover, er alle disse applikationer i bedste fald stadig forslag, og der skal gøres mere forskning for yderligere at forbedre slimrobottens ydeevne.
Forskerne har bemærket, at selve slimet er giftigt og i øjeblikket ikke egnet til brug i den menneskelige krop. De magnetiske partikler, der styrer slimet, gør slimrobotten giftig. Forskerne var nødt til at tilføje et lag silicabelægning for at gøre slimet sikkert at bruge.
Konklusion
Området for blød robotteknologi er stadig relativt nyt, men viser allerede en masse løfter. Den potentielle brug af bløde robotter i medicinske og kirurgiske applikationer kan føre til flere reddede liv. Ideen om bærbare bløde robotter kan potentielt hjælpe mennesker med handicap.
Jeg var endda forbløffet over, at NASA-forskere er begyndt at gøre det udvikle bløde robotter til at hjælpe astronauter med at forblive sikre under kredsløb.
Forhåbentlig vil mere forskning frigøre det fulde potentiale af blød kropsrobotik i en verden, hvor mennesker har sat mere og mere tillid til maskiner.
Hvad tænker du om fremtiden for blød robotteknologi?



Giv en kommentar