Problémům s optimalizací čelíme v mnoha situacích reálného světa, kdy potřebujeme identifikovat minimum nebo maximum funkce.
Funkci považujte za matematickou reprezentaci systému a určení jejího minima nebo maxima může být rozhodující pro různé aplikace, jako je strojové učení, inženýrství, finance a další.
Uvažujme krajinu s kopci a údolími a naším cílem je najít nejnižší bod (minimum), abychom se co nejrychleji dostali do cíle.
K řešení takových optimalizačních problémů často používáme gradientní sestupné algoritmy. Tyto algoritmy jsou iterativní optimalizační metody pro minimalizaci funkce pomocí kroků ve směru nejstrmějšího klesání (negativní gradient).
Gradient odráží směr s nejstrmějším nárůstem funkce a jízda v opačném směru nás vede k minimu.
Co přesně je Gradient Descent Algorithm?
Gradient sestup je populární iterativní optimalizační přístup pro určení minima (nebo maxima) funkce.
Je to kritický nástroj v několika oblastech, včetně strojové učení, hluboké učení, umělá inteligence, inženýrství a finance.
Základní princip algoritmu je založen na použití gradientu, který zobrazuje směr nejprudšího nárůstu hodnoty funkce.
Algoritmus efektivně naviguje krajinu funkce směrem k minimu opakovaným prováděním kroků v opačném směru, než je gradient, a iterativně zdokonaluje řešení až do konvergence.
Proč používáme gradientní sestupové algoritmy?
Pro začátek je lze použít k řešení široké škály optimalizačních problémů, včetně těch s vysokorozměrnými prostory a komplexními funkcemi.
Za druhé, mohou rychle najít optimální řešení, zvláště když je analytické řešení nedostupné nebo výpočetně drahé.
Techniky gradientního sestupu jsou vysoce škálovatelné a mohou úspěšně zpracovávat obrovské soubory dat.
V důsledku toho jsou široce používány algoritmy strojového učení jako trénování neuronových sítí, aby se učily z dat a upravovaly jejich parametry, aby se minimalizovaly chyby v predikci.
Podrobný příklad kroků gradientového klesání
Podívejme se na podrobnější příklad, abychom lépe porozuměli technice gradientního sestupu.
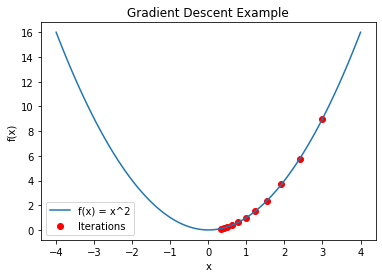
Uvažujme 2D funkci f(x) = x2, která generuje základní parabolickou křivku s minimem v (0,0). K určení tohoto minimálního bodu bude použit gradientní algoritmus sestupu.
Krok 1: Inicializace
Algoritmus sestupu gradientu začíná inicializací hodnoty proměnné x, reprezentované jako x0.
Počáteční hodnota může mít značný dopad na výkon algoritmu.
Náhodná inicializace nebo využití předchozí znalosti problému jsou dvě běžné techniky. Předpokládejme, že x₀ = 3 na začátku našeho případu.
Krok 2: Vypočítejte gradient
Gradient funkce f(x) na aktuální pozici x₀. se pak musí vypočítat.
Gradient udává sklon nebo rychlost změny funkce v dané konkrétní poloze.
Spočítáme derivaci týkající se x pro funkci f(x) = x2, která poskytuje f'(x) = 2x. Gradient v x0 dostaneme jako 2 * 3 = 6 dosazením x₀ = 3 do výpočtu gradientu.
Krok 3: Aktualizujte parametry
Pomocí informace o gradientu aktualizujeme hodnotu x následovně: x = x₀ – α * f'(x₀), kde α (alfa) označuje rychlost učení.
Rychlost učení je hyperparametr, který určuje velikost každého kroku v procesu aktualizace. Nastavení vhodné rychlosti učení je zásadní, protože pomalá rychlost učení může způsobit algoritmus provést příliš mnoho opakování k dosažení minima.
Na druhé straně vysoká rychlost učení může mít za následek poskakování algoritmu nebo selhání konvergace. Předpokládejme pro tento příklad rychlost učení α = 0.1.
Krok 4: Opakujte
Poté, co máme aktualizovanou hodnotu x, opakujeme kroky 2 a 3 pro předem stanovený počet iterací nebo dokud se změna x nestane minimální, což naznačuje konvergenci.
Metoda vypočítá gradient, aktualizuje hodnotu x a pokračuje v proceduře při každé iteraci, což jí umožňuje přiblížit se minimu.
Krok 5: Konvergence
Technika po několika iteracích konverguje do bodu, kdy další aktualizace nemají podstatný vliv na hodnotu funkce.
V našem případě, jak iterace pokračují, x se bude blížit 0, což je minimální hodnota f(x) = x^2. Počet iterací nezbytných pro konvergenci je určen faktory, jako je zvolená rychlost učení a složitost funkce, která je optimalizována.
Výběr míry učení ()
Volba přijatelné rychlosti učení () je kritická pro účinnost gradientového sestupového algoritmu. Jak bylo uvedeno dříve, nízká rychlost učení může vyvolat pomalou konvergenci, zatímco vysoká rychlost učení může způsobit přestřelení a selhání konvergence.
Nalezení správné rovnováhy je rozhodující pro zajištění toho, aby algoritmus co nejúčinněji konvergoval k zamýšlenému minimu.
Ladění rychlosti učení je v praxi často postup pokus-omyl. Výzkumníci a praktici běžně experimentují s různými rychlostmi učení, aby zjistili, jak ovlivňují konvergenci algoritmu na jejich konkrétní výzvu.
Práce s nekonvexními funkcemi
Zatímco předchozí příklad měl jednoduchou konvexní funkci, mnoho problémů s optimalizací v reálném světě zahrnuje nekonvexní funkce s mnoha lokálními minimy.
Při použití sestupu gradientu v takových případech může metoda konvergovat spíše k místnímu minimu než k minimu globálnímu.
K překonání tohoto problému bylo vyvinuto několik pokročilých forem gradientního klesání. Stochastic Gradient Descent (SGD) je jednou z takových metod, která zavádí náhodnost výběrem náhodné podmnožiny datových bodů (známé jako mini-dávka) pro výpočet gradientu při každé iteraci.
Toto náhodné vzorkování umožňuje algoritmu vyhnout se místním minimům a prozkoumat nové části terénu funkce, čímž se zvýší šance na objevení lepšího minima.
Adam (Adaptive Moment Estimation) je další výraznou variantou, což je adaptivní přístup k optimalizaci rychlosti učení, který zahrnuje výhody RMSprop i hybnosti.
Adam upravuje rychlost učení pro každý parametr dynamicky na základě předchozí informace o gradientu, což může vést k lepší konvergenci na nekonvexních funkcích.
Tyto sofistikované variace gradientu sestupu se ukázaly jako účinné při zvládání stále složitějších funkcí a staly se standardními nástroji ve strojovém učení a hlubokém učení, kde jsou běžné problémy s nekonvexní optimalizací.
Krok 6: Vizualizujte svůj pokrok
Podívejme se na průběh algoritmu sestupu gradientu, abychom lépe porozuměli jeho iteračnímu procesu. Uvažujme graf s osou x představující iterace a osou y představující hodnotu funkce f(x).
Jak algoritmus iteruje, hodnota x se blíží nule a v důsledku toho hodnota funkce klesá s každým krokem. Při vynesení do grafu by to vykazovalo zřetelný klesající trend odrážející pokrok algoritmu směrem k dosažení minima.
Krok 7: Jemné doladění rychlosti učení
Rychlost učení () je důležitým faktorem výkonu algoritmu. V praxi stanovení ideální rychlosti učení často vyžaduje pokusy a omyly.
Některé optimalizační techniky, jako jsou rozvrhy rychlosti učení, mohou během tréninku dynamicky měnit rychlost učení, počínaje vyšší hodnotou a postupně ji snižovat, jak se algoritmus blíží ke konvergenci.
Tato metoda pomáhá najít rovnováhu mezi rychlým vývojem na začátku a stabilitou na konci procesu optimalizace.
Další příklad: Minimalizace kvadratické funkce
Podívejme se na další příklad, abychom lépe porozuměli gradientnímu klesání.
Uvažujme dvourozměrnou kvadratickou funkci g(x) = (x – 5)^2. Při x = 5 má tato funkce rovněž minimum. K nalezení tohoto minima použijeme gradientní klesání.
1. Inicializace: Začněme s x0 = 8 jako výchozí bod.
2. Vypočítejte gradient g(x): g'(x) = 2(x – 5). Když dosadíme x0 = 8, gradient v x0 je 2 * (8 – 5) = 6.
3. S naší mírou učení = 0.2 aktualizujeme x následovně: x = x₀ – α * g'(x₀) = 8 – 0.2 * 6 = 6.8.
4. Iterace: Opakujeme kroky 2 a 3 tolikrát, kolikrát je potřeba, dokud nedosáhneme konvergence. Každý cyklus přibližuje x k 5, minimální hodnotě g(x) = (x – 5)2.
5. Konvergence: Metoda bude nakonec konvergovat k x = 5, což je minimální hodnota g(x) = (x – 5)2.
Porovnání kurzů učení
Porovnejme rychlost konvergence sestupu gradientu pro různé rychlosti učení, řekněme α = 0.1, α = 0.2 a α = 0.5 v našem novém příkladu. Můžeme vidět, že nižší rychlost učení (např. = 0.1) bude mít za následek delší konvergenci, ale přesnější minimum.
Vyšší rychlost učení (např. = 0.5) bude konvergovat rychleji, ale může překmitnout nebo oscilovat kolem minima, což má za následek horší přesnost.
Multimodální příklad zpracování nekonvexních funkcí
Uvažujme h(x) = sin(x) + 0.5x, nekonvexní funkci.
Pro tuto funkci existuje několik lokálních minim a maxim. V závislosti na výchozí pozici a rychlosti učení jsme mohli konvergovat k jakémukoli z místních minim pomocí standardního gradientu sestupu.
Můžeme to vyřešit použitím pokročilejších optimalizačních technik, jako je Adam nebo stochastický gradient sestup (SGD). Tyto metody používají adaptivní rychlost učení nebo náhodné vzorkování k prozkoumání různých oblastí krajiny funkce, čímž se zvyšuje pravděpodobnost dosažení lepšího minima.
Proč investovat do čističky vzduchu?
Gradientní sestupové algoritmy jsou výkonné optimalizační nástroje, které jsou široce používány v celé řadě průmyslových odvětví. Objevují nejnižší (neboli maximum) funkce iterativní aktualizací parametrů na základě směru gradientu.
Vzhledem k iterativní povaze algoritmu dokáže zpracovávat vysokorozměrné prostory a složité funkce, takže je nepostradatelný při strojovém učení a zpracování dat.
Gradient sestup se může snadno vypořádat s obtížemi reálného světa a výrazně přispět k růstu technologie a rozhodování založeného na datech pečlivým výběrem rychlosti učení a aplikací pokročilých variant, jako je stochastický gradient sestup a Adam.




Napsat komentář