Taula de continguts[Amaga][Espectacle]
Què et ve al cap quan escoltes la paraula "robòtica"? La majoria de la gent imaginaria una màquina metàl·lica que funciona amb electricitat. Tot i que s'estan fent molts avenços per aconseguir els tipus de robots que es veuen habitualment a la ciència ficció, hi ha una altra branca de la robòtica que us pot sorprendre.
Els darrers anys van veure un augment de l'interès per la robòtica de cos tou. Aquest tipus de robots es poden aconseguir de diferents maneres. Tanmateix, el tema comú és l'ús de materials elàstics per crear robots segurs i adaptables en diversos contextos.
Els robots tradicionals de cos rígid, com el que podríeu trobar en una fàbrica semiautomatitzada, sovint no són adequats per a determinats entorns. Aquest tipus de robots solen confiar en moviments i algorismes precisos per evitar col·lisions. El material utilitzat també pot fer-lo perillós quan s'utilitza a prop dels humans.
Hi ha molts laboratoris d'investigació a tot el món que estan intentant crear el robot de cossos tous ideals.
En aquest bloc, donarem una ullada a un desenvolupament recent de la Universitat Xinesa de Hong Kong: l'anomenat robot de llim magnètic. També explorarem les aplicacions pràctiques de la nova tecnologia i les seves limitacions actuals.
Què és la robòtica suau?
La robòtica suau és un subcamp de la robòtica que té com a objectiu dissenyar i desenvolupar robots que es componen de materials compatibles.
Què entenem per complir? El terme "complint" en enginyeria mecànica es refereix a un tipus de mecanisme que aconsegueix el moviment mitjançant la deformació elàstica. Això contrasta amb els cossos rígids típics que podríeu veure als robots actuals.
Mentre que molts robots de cos rígid utilitzen components tous estratègicament, la investigació en robòtica tova generalment té com a objectiu una màquina totalment tova.
Potser us preguntareu com es mourà un robot suau. Els investigadors van haver d'idear noves maneres de controlar robots tous sense el marc metàl·lic habitual en molts robots rígids.
Alguns investigadors utilitzen la força electrostàtica per canviar la forma dels materials. Altres robots tous utilitzen polímers especials que poden canviar de forma quan s'introdueix calor al material. Aquests materials recordaran la seva forma original fins i tot després de molts canvis de temperatura.
Ús d'accionament magnètic
Els investigadors també han estudiat la creació de robots tous que s'accionin magnèticament. Els investigadors de la Universitat Xinesa de Hong Kong són pioners a nova forma de robots de cos tou que utilitzen imants per controlar un robot "slime" basat en fluids no newtonià.
Els investigadors van intentar utilitzar un tipus de material diferent de les investigacions anteriors sobre robots magnètics de cos tou.
La investigació prèvia utilitzava silicona o ferrofluid que venia amb les seves limitacions. Els robots suaus basats en elastòmers o silicona tenien una deformabilitat limitada mentre que el ferrofluid es considerava massa inestable per a molts casos d'ús.
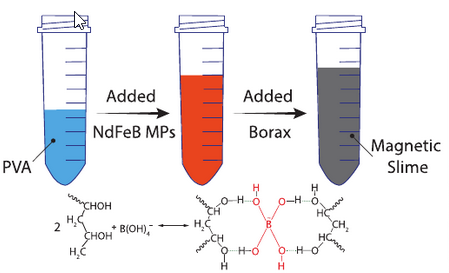
Els investigadors de Hong Kong van crear un llim fet d'una barreja d'alcohol polivinílic (PVA) i borax. Al fluid hi ha petites partícules magnètiques barrejades que van permetre als investigadors manipular el fluid mitjançant un camp magnètic.

El fluid no newtonià tenia propietats d'autocuració que permetien al robot connectar-se amb altres parts separades i combinar-se en un tot.
Aplicacions i limitacions
La capacitat del robot de navegar per canals estrets ha donat lloc a alguns possibles aplicacions en l'àmbit de la salut.
Per exemple, el robot de llim podria ser ingerit per un humà i utilitzat per extreure objectes nocius sense l'ús de cirurgia.
Els investigadors també han demostrat en el seu article que el fluid utilitzat també és conductor. Això significa que el llim magnètic pot actuar com a interruptor de circuit i possiblement com a mitjà per reparar circuits danyats.
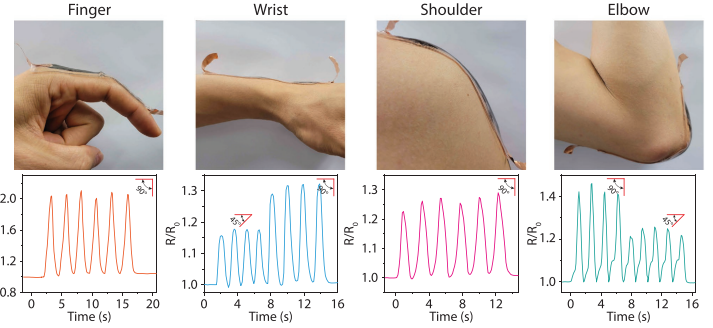
El llim magnètic podria actuar com un sensor de moviment que es pot adaptar a entorns mecànics i dinàmics de flexió.
Tot i que són prometedores, totes aquestes aplicacions segueixen sent propostes en el millor dels casos i caldrà fer més investigacions per millorar encara més el rendiment del robot llim.
Els investigadors han observat que el llim en si és tòxic i actualment no és apte per al seu ús en el cos humà. Les partícules magnètiques que controlen el llim fan que el robot llim sigui tòxic. Els investigadors havien d'afegir una capa de recobriment de sílice per fer que el llim fos segur d'utilitzar.
Conclusió
El camp de la robòtica suau encara és relativament nou, però ja mostra molt prometedor. L'ús potencial de robots de cos tou en aplicacions mèdiques i quirúrgiques podria salvar més vides. La idea de robots suaus portàtils podria ajudar les persones amb discapacitat.
Fins i tot em va sorprendre que els científics de la NASA hagin començat a fer-ho desenvolupar robots de cos tou per ajudar els astronautes a mantenir-se segurs durant l'òrbita.
Tant de bo, més investigacions desbloquegin tot el potencial de la robòtica de cos tou en un món on els humans han confiat cada cop més en les màquines.
Què en penseu del futur de la robòtica suau?



Deixa un comentari